| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
ESI文件是描述从站设备信息的文件,由EtherCAT从站设备商提供。
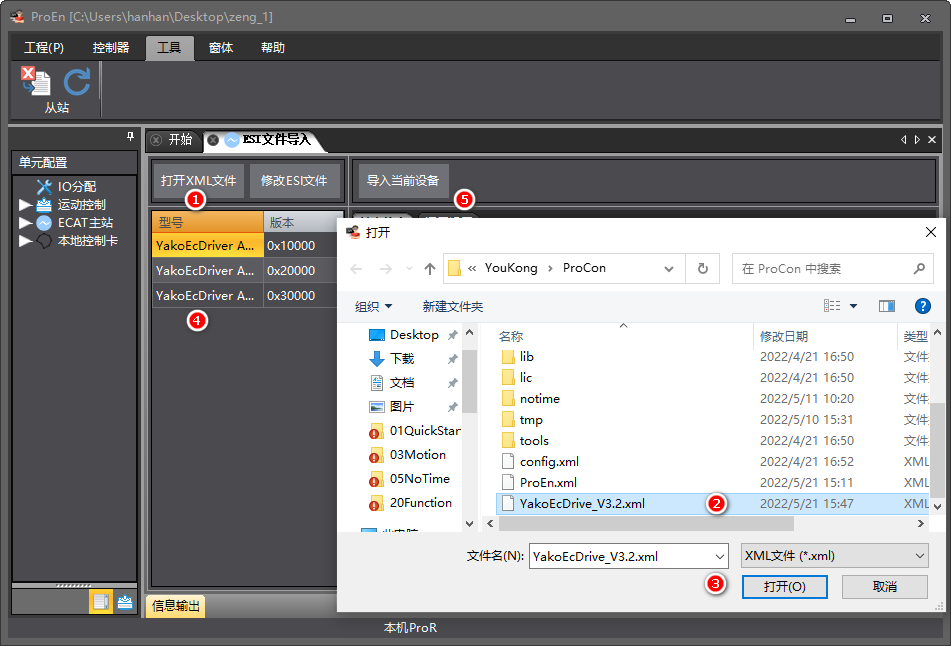
点击菜单栏的工具,选择ESI文件导入,打开下图界面。
| 序号 | 注释 |
| 1 | 点击打开XML文件 |
| 2 | 找到对应目录需要导入的XML文件 |
| 3 | 选择打开 |
| 4 | 选择对应的版本 |
| 5 | 如果无需修改则可直接导入到对应目录中去(一般驱动器需要单独设置一下,IO模拟量等模块可直接导入)目录:D:\YouKong\ProCon\ecat\dev |
1.目前驱动器从站都是默认使用CSP模式,所以需要手动打开DC同步,以及检测PDO中是否存在必要的PDO(通用设置里勾选专家设置)

| 序号 | 注释 |
| 1 | 选择分布式时钟 |
| 2 | 同步模式选择DC模式 |
| 3 | PDO超时时间设置为500-1000(从站断开连接后IO或者驱动器报警的超时设置) |
| 4 | 勾选开启 |
| 5 | 勾选开启 |
2.PDO设置
①输出的PDO
| 序号 | 注释 |
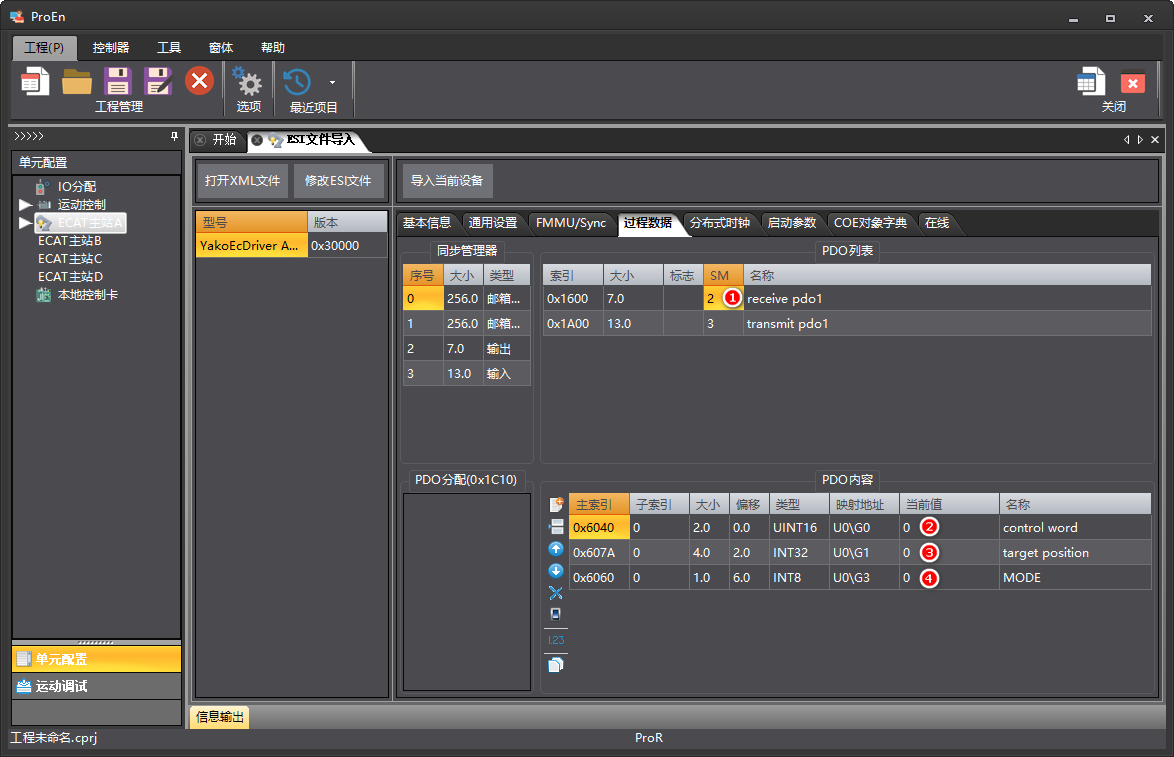
| 1 | 选择过程数据 |
| 2 | 点击SM为2的那一栏,在PDO内容里就会显示输出的PDO列表 |
| 3 | 必备的:6040,驱动器的控制字,如果没有需要手动添加 |
| 4 | 必备的:607A,驱动器的目标位置,如果没有需要手动添加 |
| 5 | 必备的:6060,驱动器的模式切换,如果没有需要手动添加 |
注意:③④⑤为驱动器控制必备的PDO,至少需要这三个。如果还需要别的输出的pdo,应在添加完必要的寄存器且进行初始化连接成功后,再根据手册进行添加。
②输入的PDO
| 序号 | 注释 |
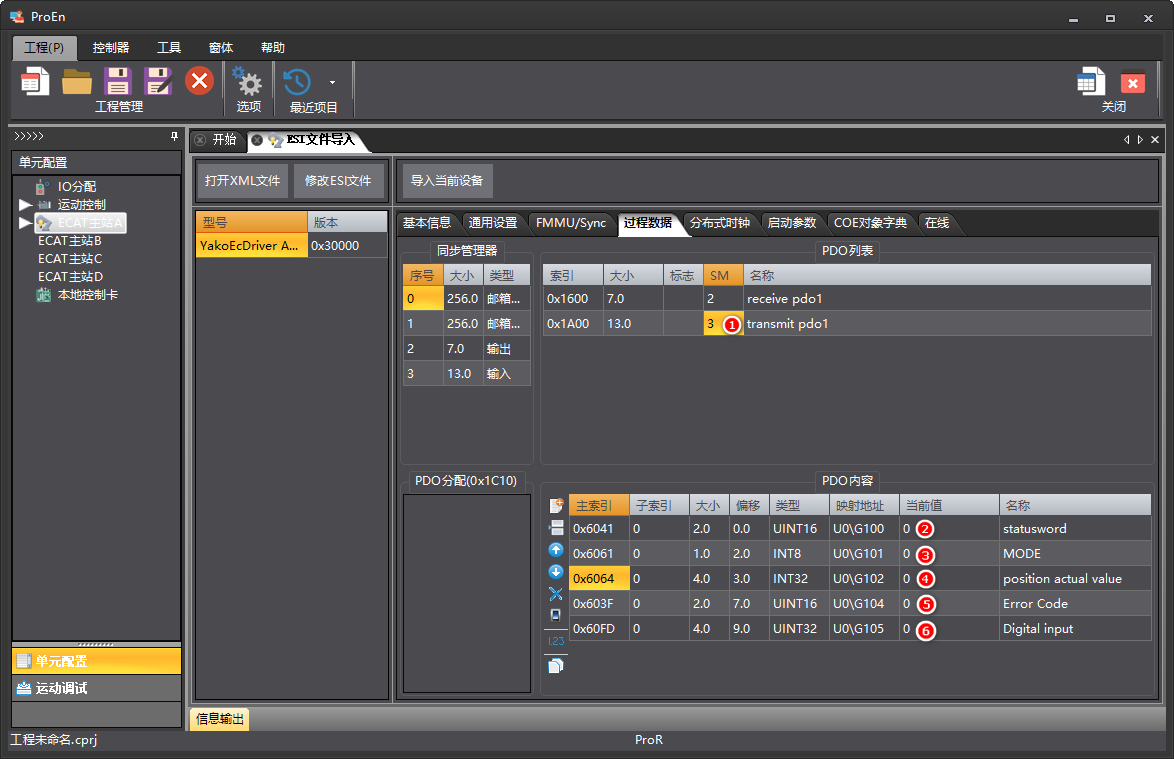
| 1 | 点击SM为3的那一栏,在PDO内容里就会显示输出的PDO列表 |
| 2 | 必备的:6041,驱动器的状态字,如果没有需要手动添加 |
| 3 | 必备的:6061,驱动器的当前模式,如果没有需要手动添加 |
| 4 | 必备的:6064,驱动器的实际位置,如果没有需要手动添加 |
| 5 | 603F,驱动器的错误代码 |
| 6 | 60FD,驱动器的IO状态,可驱动器限位原点状态 |
注意:②③④为驱动器控制必备的PDO,至少需要这三个。如果还需要别的输入的pdo,应在添加完必要的寄存器且进行初始化连接成功后,再根据手册进行添加。
注意:⑤⑥可用可不用,但是一般默认最好加上,否则回原和报警功能会不正常
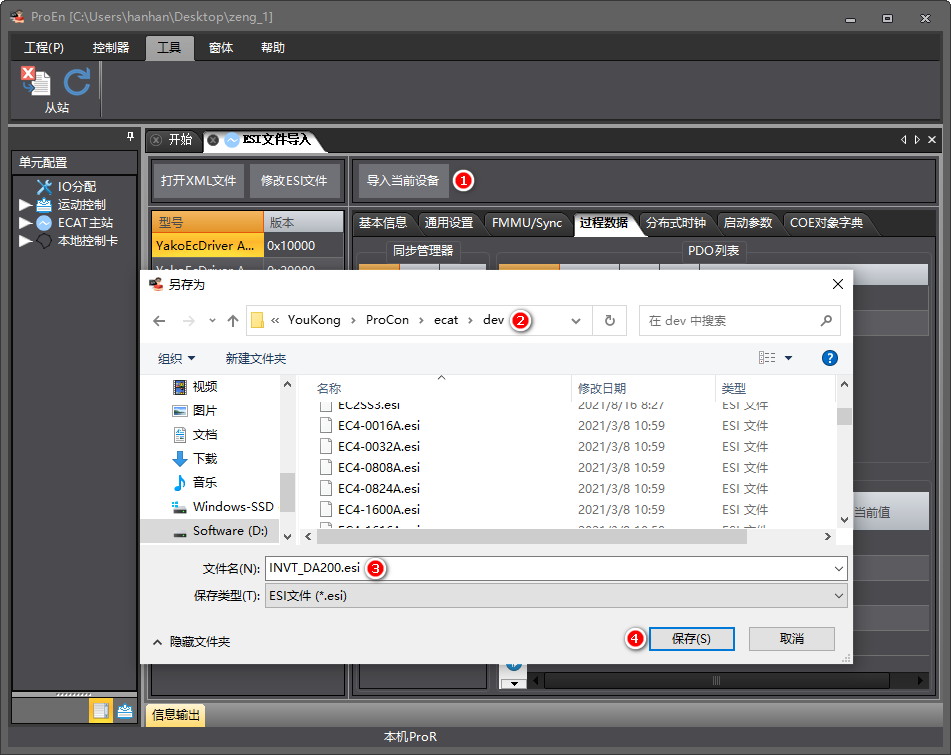
驱动器按照上面的规范设置好,IO和模拟量等其他从站一般不需要设置别的地方,直接导入当前设备即可,最后导入完成之后需要重启ProEn。
| 序号 | 注释 |
| 1 | 点击导入当前设备 |
| 2 | 选择目录:D:\YouKong\ProCon\ecat\dev |
| 3 | 设置好名称,可根据型号名填写 |
| 4 | 选择保存 |
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |