
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
配置和调试工具
双击桌面ProEn图标,打开ProEn。
点击"新建工程"新建API工程。以此种方式新建的工程还是未保存的,可在新建框设置工程名称及工程路径即可自动保存。未保存的工程关闭时也会有提示。

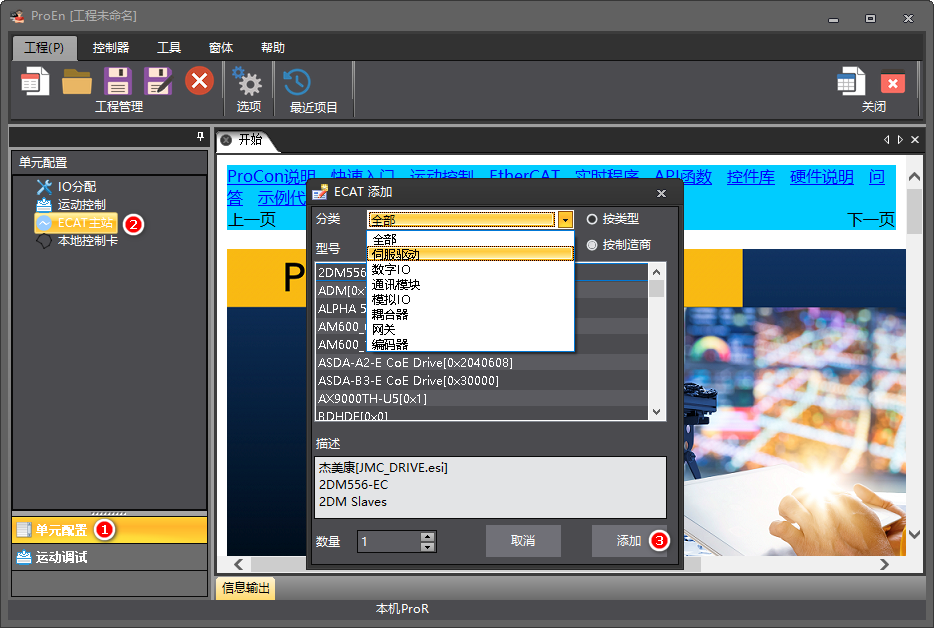
点击"单元配置"右键"主站"点击添加(多主站不管是否启用,都可正常配置,且要正确配置),将所需要的从站按照网线顺序添加进来
右键"运动控制"点击添加。添加对应数量的轴数。双击轴0-轴n,在基本属性栏将每个轴选择对应的类型,站点,通道绑定到对应的EtherCAT从站
注意:修改①②③④⑤⑥这些参数后,都需要重新热复位,才能使参数生效。
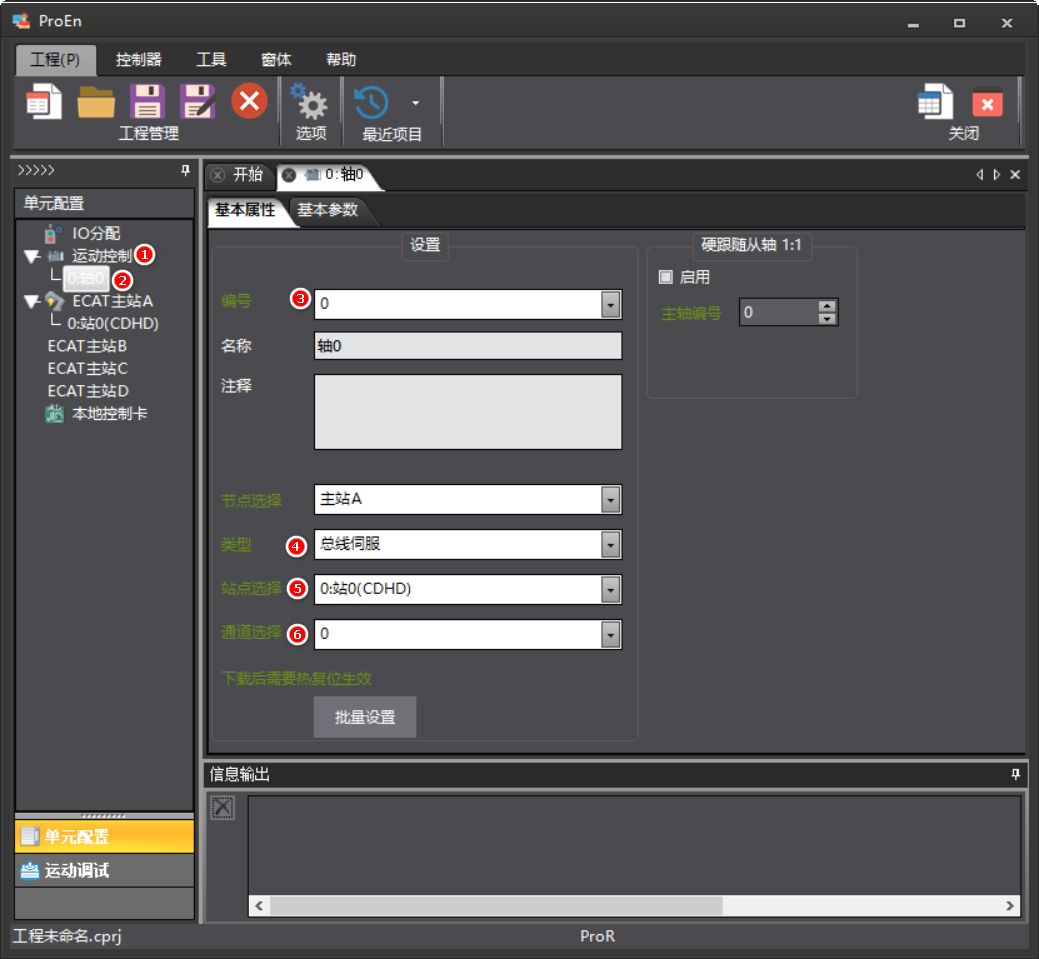
| 序号 | 注释 |
| 1 | 运动控制选项 |
| 2 | 选择对应的轴号 |
| 3 | 轴序号:函数调用控制的轴序号 |
| 4 | 类型:选择轴的类型,分为"总线伺服"代表EtherCAT从站伺服。"虚拟轴"代表虚拟的轴,虚拟轴不占用授权。"本地脉冲"代表优易控公司PC自带的脉冲卡。 |
| 5 | 站点选择:选择对应的EtherCAT从站号,系统会自动过滤除伺服步进之外的从站 |
| 6 | 通道选择:部分从站会有两个或者两个以上的轴通道。 |
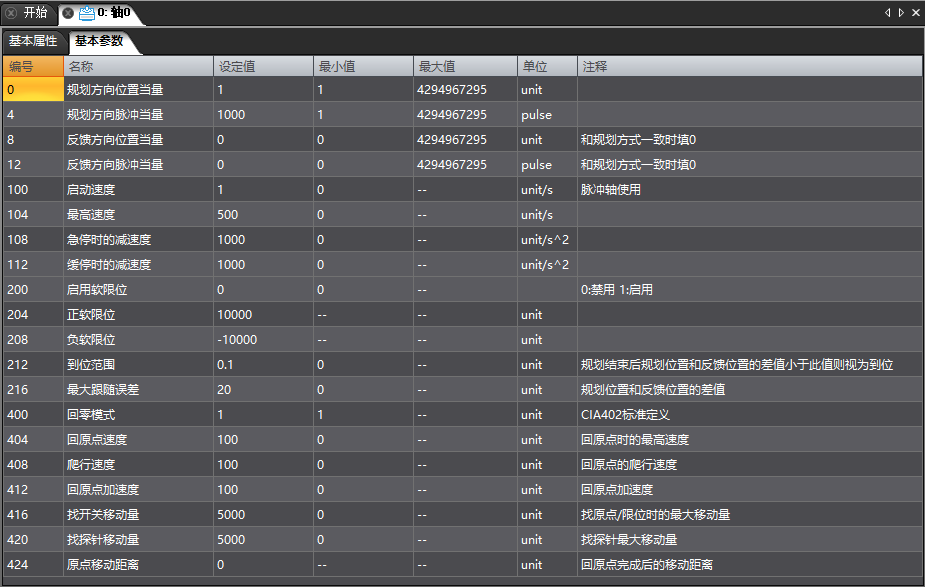
一些轴的公共参数也可以先在基本参数上面设置(也可以使用API函数进行设置),双击编号栏可批量设置
注意:该界面可设置最高速度,下载后会保存在本地文件,系统启动时会从这个文件初始化参数;用api设置的参数则不会保存。

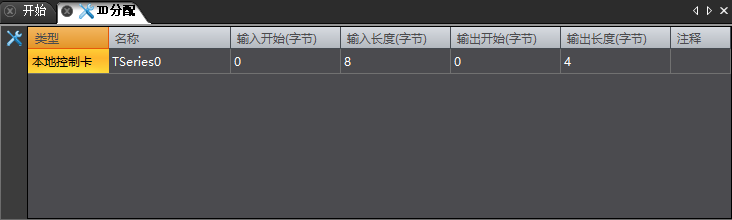
双击①"IO分配"可查看对应的IO分配信息,输入输出开始字节可手动分配

需先打开ProR
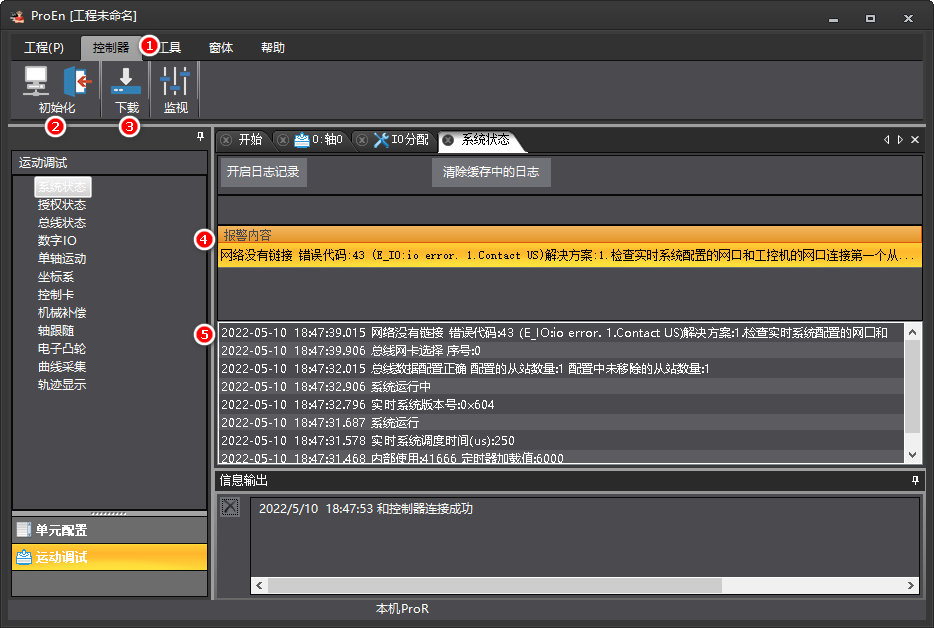
| 序号 | 注释 |
| 1 | 点击控制器 |
| 2 | 连接 |
| 3 | 下载配置;ProEn下载过配置的时候冷复位,热复位,系统退出才会自动保存配置文件 |
| 4 | 当前报警内容显示 |
| 5 | 系统日志信息 |
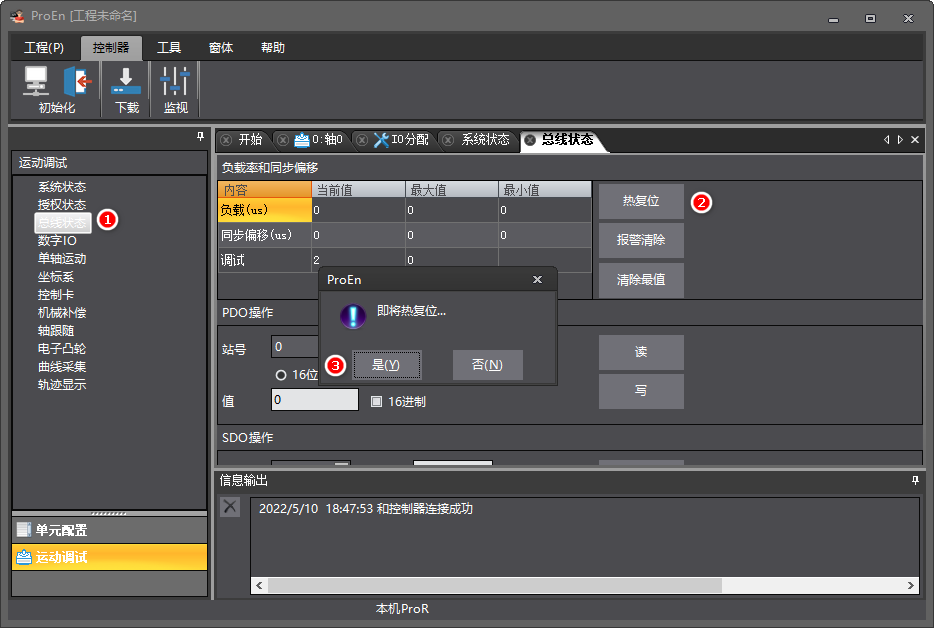
| 序号 | 注释 |
| 1 | 点击总线状态 |
| 2 | 点击热复位 |
| 3 | 选择是,系统将重新初始化总线以及轴状态 |
切换回系统状态,查看配置更新信息,总线运行中且无报警即复位完成
双击打开"单轴调试"可调试轴的基础功能。轴序号可切换其他轴调试
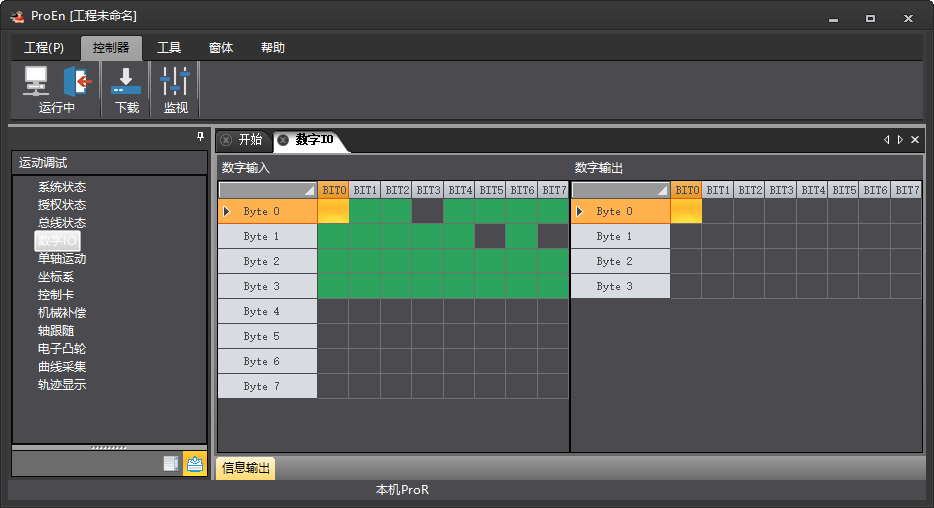
双击数字IO,可查看输入及操作输出(左边输入,右边输出)

| 序号 | 注释 |
| 1 | 标题栏:显示工程路径及工程名称 |
| 2 | 菜单栏:根据工作区激活类型隐藏或显示 |
| 3 | 标准工具栏:根据工作区激活类型禁用或使能 |
| 4 | 程序工具栏:根据工作区激活类型禁用或使能 |
| 5 | 工作区:工作区域及说明书 |
| 6 | 信息输出:使用过程中的各类信息提示 |
| 7 | 单元配置:这里显示的内容会保存在工程文件中 |
| 8 | 运动调试:各种状态调试界面 |


EtherCAT从站的XML文件导入或修改

快速切换窗口或关闭所有窗口


![]() :新建工程
:新建工程
![]() :打开工程
:打开工程
![]() :保存工程
:保存工程
![]() :另存为
:另存为
![]() :退出
:退出
![]() :选项
:选项
![]() :最近项目
:最近项目
![]() :另启动一个
:另启动一个
![]() :关闭
:关闭
![]() :连接
:连接
![]() :断开
:断开
![]() :下载
:下载
![]() :监视
:监视
![]() :从站
:从站
![]() :从站数据刷新
:从站数据刷新
![]() :关闭所有窗体
:关闭所有窗体
![]() :关闭其他窗体
:关闭其他窗体
![]() :打开的窗体
:打开的窗体
![]() :CHM帮助
:CHM帮助
![]() :本机帮助
:本机帮助
![]() :在线帮助
:在线帮助
![]() :关于
:关于
工作区及说明书
使用过程中的各类信息提示
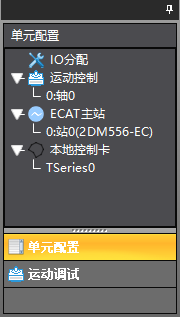
双击"IO分配"可查看对应的IO分配信息。单击输入输出开始字节可以手动分配,也可以点左上角工具自动分配
右键“运动控制”可添加运动轴。双击轴序号可配置该轴参数
| 序号 | 注释 |
| 1 | 编号:函数调用控制的轴序号 |
| 2 | 名称:轴的命名 |
| 3 | 注释:轴的说明 |
4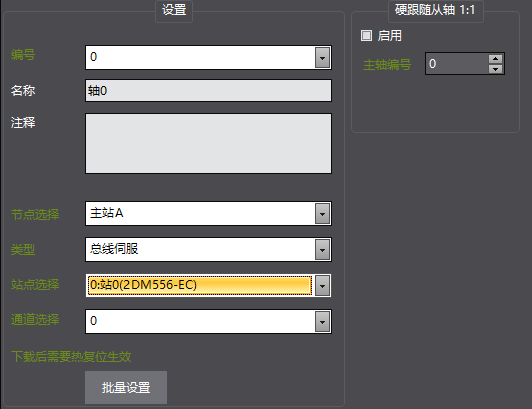 |
类型:选择轴的类型,分为"总线伺服"代表从站伺服,"虚拟轴"代表虚拟的轴,"本地脉冲"代表优易控公司PC自带的脉冲卡。 |
| 5 | 站点选择:选择对应的从站号,系统会自动过滤除伺服步进之外的从站。 |
| 6 | 通道选择:部分从站会有两个或者两个以上的轴通道。 |
| 7 | 启用高级运动:勾选可使用特性列表的功能。 |
双击对应“编号”栏可以批量设置所选择的轴参数。
注意:每次修改以下轴基本参数后,都只需要重新下载,才能生效
右键“主站”可添加所需要的从站,按网线连接顺序添加。
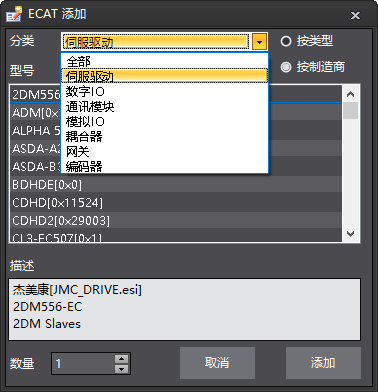
双击从站名称打开从站配置界面
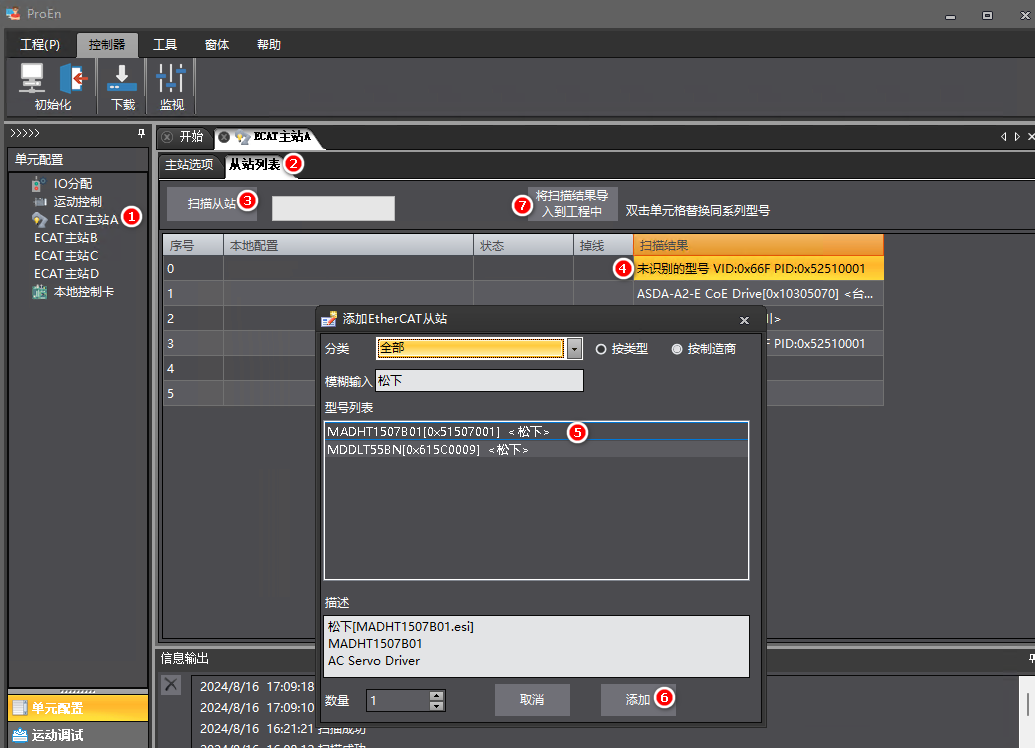
| 序号 | 注释 |
| 1 | 双击选中要扫描的主站 |
| 2 | 打开从站列表 |
| 3 | 开始自动扫描选中主站下的从站 |
| 4 | esi库中有同系列型号的从站,可以手动添加相似型号 |
| 5 | 选中相似型号从站 |
| 6 | 点击添加从站 |
| 7 | 将扫描结果导入到工程 |
显示从站设备的基本信息,均由厂商的ESI文件获取,用户无法修改

| 序号 | 注释 |
| 1 | 设备分类:从站类型。 |
| 2 | 通道数量:对于驱动器而言,一个站点含有几路电机控制。 |
| 3 | 制造商信息:识别码为ETG组织统一分配的代码,ProU用这个码区分各厂家的设备。 |
| 4 | 设备信息:产品基本信息。 |

| 序号 | 注释 |
| 1 | 启用设备:选择不启用时,该站点需要在接入在总线环路中,但ProR会忽略对该站点的访问(用在从站有报错无法解决,但是需要连接的情况)。 |
| 2 | 从总线上移除:勾选上后且不启用设备情况下,连接网线时需跳过此驱动器。 |
| 3 | 驱动器使能:对应驱动类设备,系统启动后自动将伺服初始化为使能状态。 |
| 4 | 检查制造商ID:检查从站的供应商ID是否和设置的相符,可用来检测站点配置错误或者网线IN/OUT错误。 |
| 5 | 检查产品ID:产品ID,一般不选择。 |
| 6 | 批量设置:批量设置当前页面参数到同型号的从站。 |
| 7 | 限位探针:配置总线驱动器的限位、原点、探针(默认为EtherCAT协议的地址)。 |
ProEn根据从站ESI文件自动配置,禁止修改

一般将常用的对象字典加入到PDO列表中,提高信息交互效率。对象字典被映射到了U/G元件中,可以程序中读写U/G实现对对象字典的访问。
ProEn的默认配置可满足绝大多少需求,如果需要加入其他的对象字典,需先参考从站手册,确认待加入的对象字典是否支持PDO映射。

伺服驱动常用的PDO
输出:
| 序号 | 注释 |
| 6040 | 驱动器控制命令 |
| 6060 | 切换驱动器控制模式 |
| 607A | CSP模式下的目标位置 |
输入:
| 序号 | 注释 |
| 6041 | 驱动器控制状态 |
| 6061 | 驱动器当前控制模式 |
| 607A | 实际位置(编码器位置) |
| 603F | 报警信息 |
| 60FD | 驱动器输入信号(限位原点) |
从站数据复制
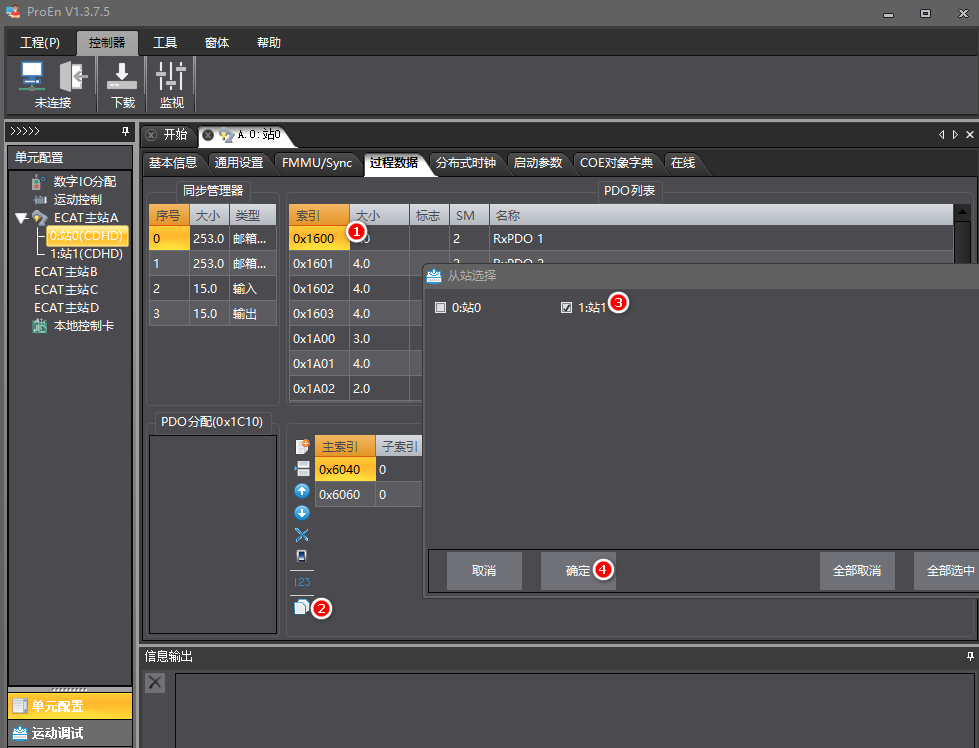
| 序号 | 注释 |
| 1 | 选择要批量复制的pdo列表下的pdo内容 |
| 2 | 批量复制按钮(次功能只能在同型号从站之间使用) |
| 3 | 勾选要复制到的从站 |
| 4 | 确认 |
pdo添加

| 序号 | 注释 |
| 1 | 添加pdo内容 |
| 2 | 选中需要添加的pdo |
| 3 | 确认添加pdo |

| 序号 | 注释 |
| 1 | 同步模式:选择同步模式(默认DC模式) |
| 2 | PDO超时时间:PDO超时时间设置,设置位为0时不超时,作用:当从站跟主站通讯超时时,从站自动处理异常,例如IO从站卡自动将输出断掉,伺服自动下使能。 |
| 3 | 开启DC:使用DC同步需要勾选上(伺服步进必须勾选上)。 |
| 4 | 同步周期倍率:同步周期默认为1ms,这里可设置周期的倍数。 |
| 5 | 启动偏移时间:修改第一次同步偏移时间。 |
| 6 | 批量设置:批量设置当前页面参数到同型号的从站。 |
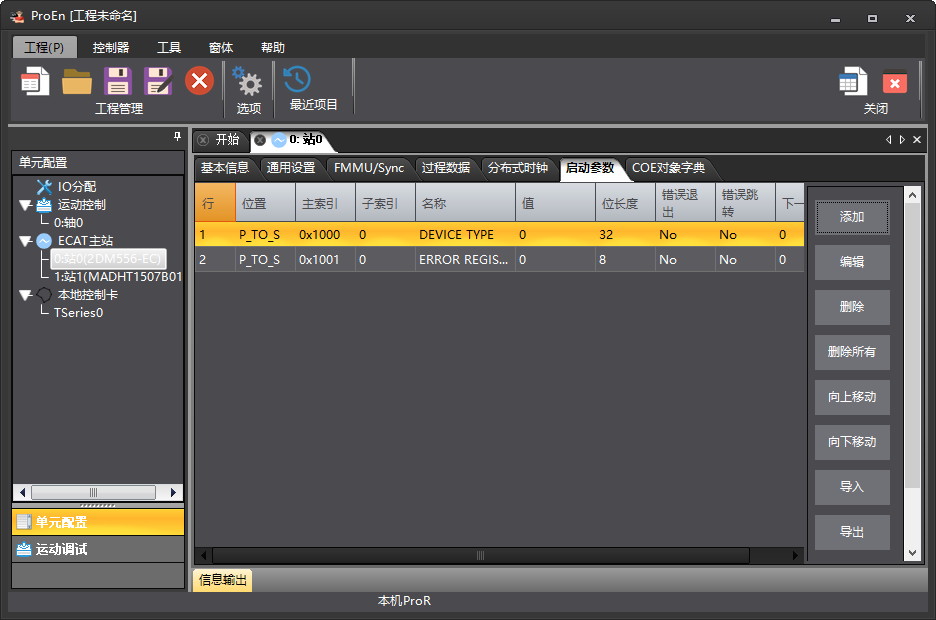
在热复位过程中,会将这里配置的初始化信息写入从站。
注意,启动条目设置,需要根据设备手册配置,不正确的配置可能会引起EtherCAT启动失败,请慎重修改。
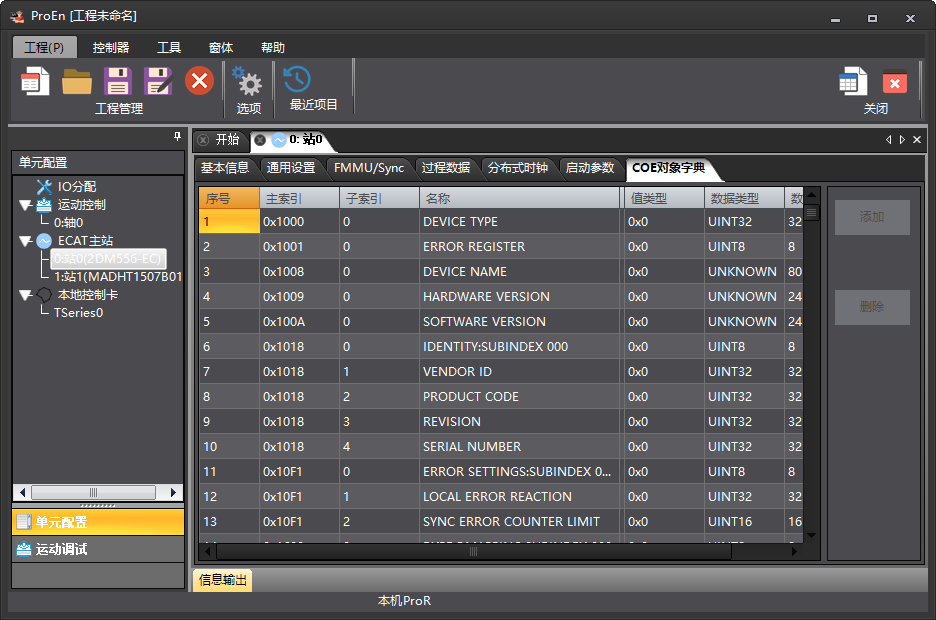
对象字典:从站的xml导入的参数列表,用来查看从站所含的参数以及功能。
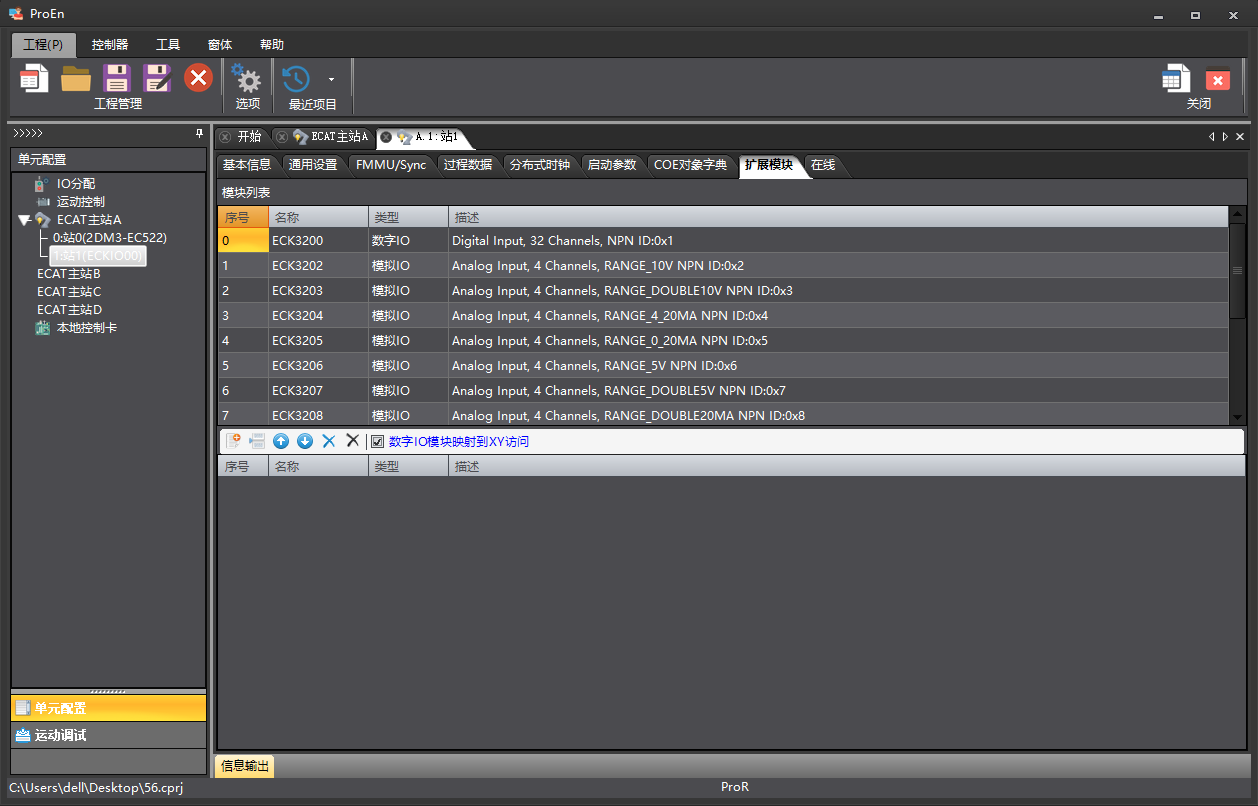
扩展模块:只有网关模块才具有扩展模块
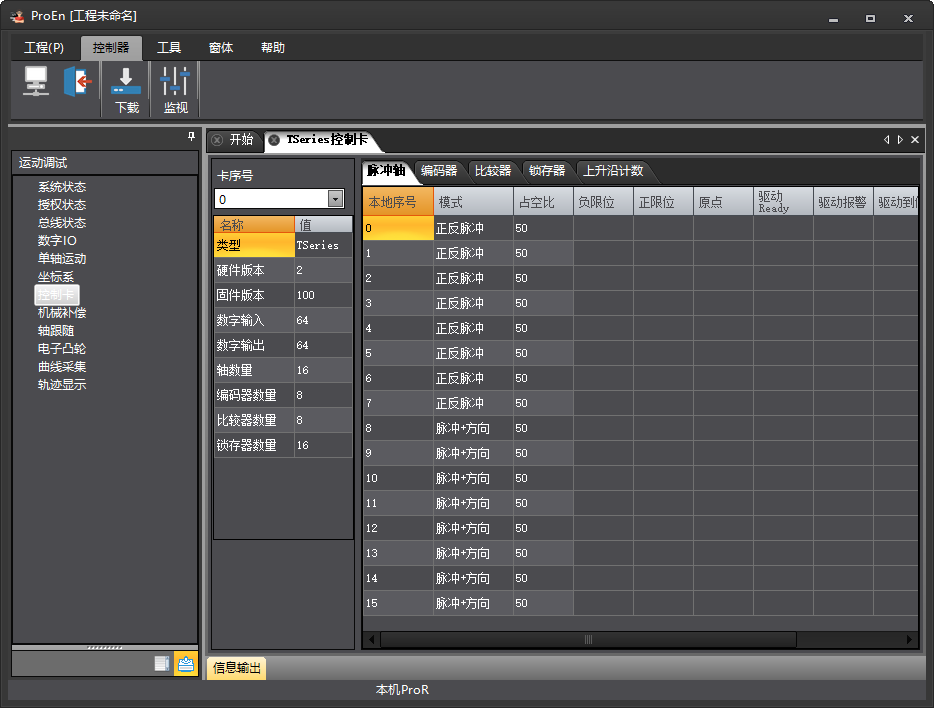
右键“本地脉冲卡”可添加PC自带的脉冲卡TSeries或XMen两种型号。
脉冲卡序号与添加顺序对应,序号从0开始。
本地卡仅可在节点A中使用。
注意:每次添加之后都需要下载并且热复位才生效
双击对应通道的“false”(常开)或“ture”(常闭)可取反该IO通道的极性

可配置脉冲卡轴的相关参数。
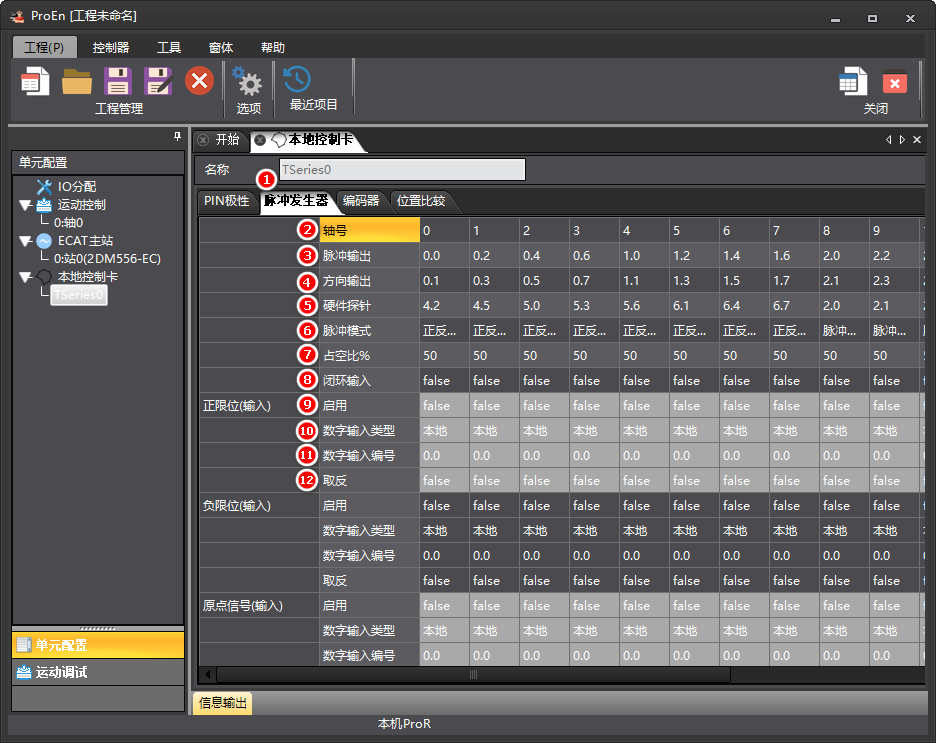
| 序号 | 注释 |
| 1 | 选择脉冲发生器 |
| 2 | 轴号:目前脉冲卡最大支持16轴 |
| 3 | 脉冲输出口:固定IO口,无法修改,只做监视用 |
| 4 | 方向输出口:固定IO口,无法修改,只做监视用 |
| 5 | 硬件探针输入:固定IO口,无法修改,只做监视用 |
| 6 | 模式选项:可选择脉冲输出的方式,目前支持“正反脉冲”和“脉冲+方向” |
| 7 | 占空比:在一段连续工作时间内脉冲占用的时间与总时间的比值 |
| 8 | 闭环输入:暂时不支持 |
| 9 | IO信号的启用:启用后才生效 |
| 10 | IO信号的选择:可设置全局IO或者本地脉冲卡的IO |
| 11 | IO信号的编号 |
| 12 | IO信号的取消:可设置IO上升沿有效或者下降沿有效 |
编码器功能的参数配置。详见:功能案例

位置比较功能的参数配置。详见:功能案例

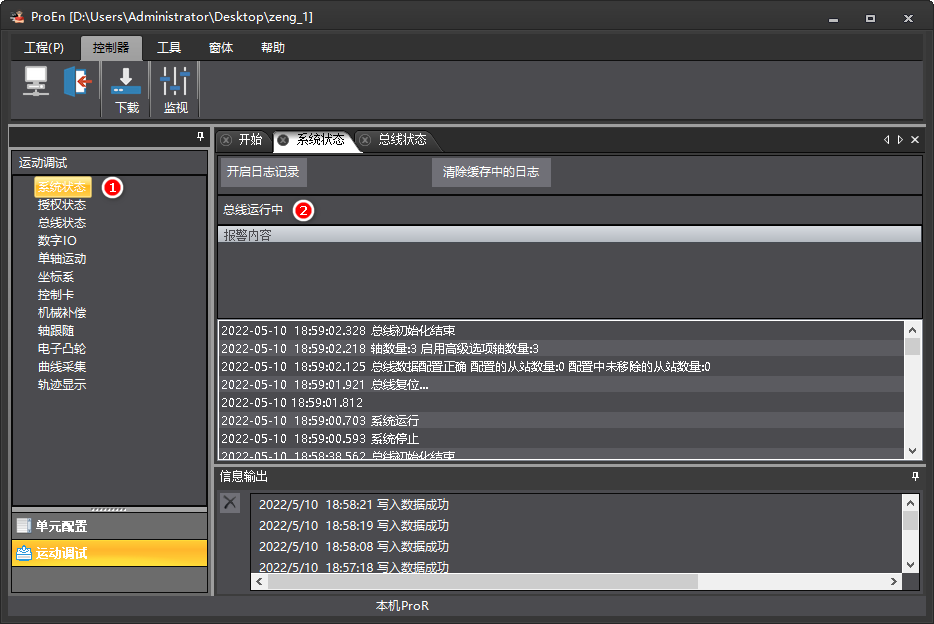
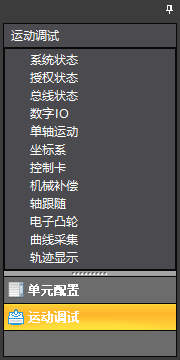
所有调试功能均要打开控制台,加载运动库后才能打开
加载运动库及查看报警信息和操作日志

| 序号 | 注释 |
| 1 | 连接:连接ProR通讯 |
| 2 | 断开:断开ProR通讯 |
| 3 | 开启日志记录:开启后可以把用户操作的函数打印在操作日志里面。 |
| 4 | 清除缓存中的日志:当日志缓存过多时可点击清除缓存。 |
可查看授权信息,详见:授权说明

可查看总线运行的状态及PDO/SDO操作

| 序号 | 注释 |
| 1 | 热复位:重新初始化EtherCAT从站,重新配置轴的基本属性和修改实际总轴数,拔网线或者链路报错,重新下载配置后需要热复位一下。 |
| 2 | 报警清除:可以清除当前的报警信息。 |
| 3 | 清除最值:清除负载和同步偏移的最大值最小值。 |
| 4 | PDO读:对应PDO数据读取。站号:从站站号,G编号:系统自动分配的编号,可在过程数据查看。 |
| 5 | PDO写:对应PDO数据读取。站号:从站站号,G编号:系统自动分配的编号,可在过程数据查看。 |
| 6 | SDO读:对应SDO数据读取。站号:从站站号,主索引:对象字典主索引,一般用16进制表示,子索引:对象字典子索引,数据类型可参考手册过对象字典例表。 |
| 7 | SDO写:对应SDO数据读取。站号:从站站号,主索引:对象字典主索引,一般用16进制表示,子索引:对象字典子索引,数据类型可参考手册过对象字典例表。 |
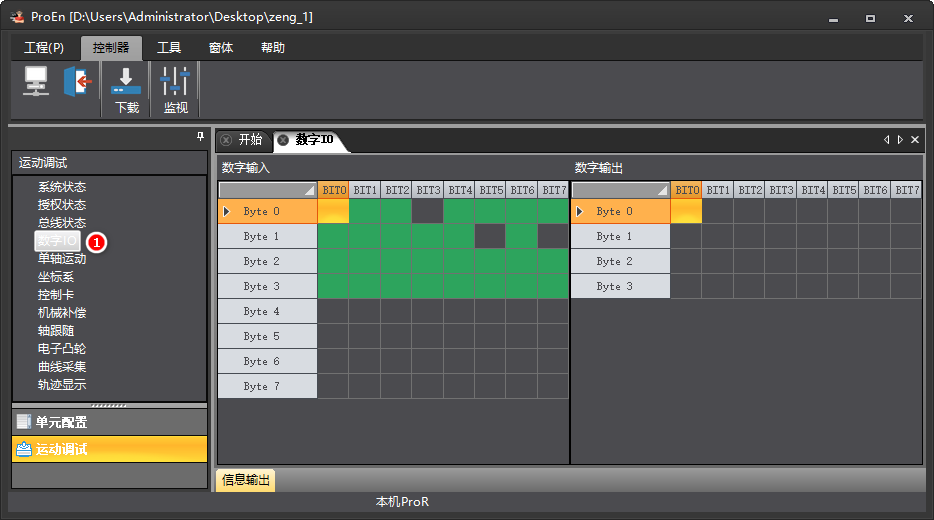
可查看输入及“双击”操作输出(左边输入,右边输出)。ProEN默认提供32个虚拟输入输出,最多可配置512个虚拟输入输出
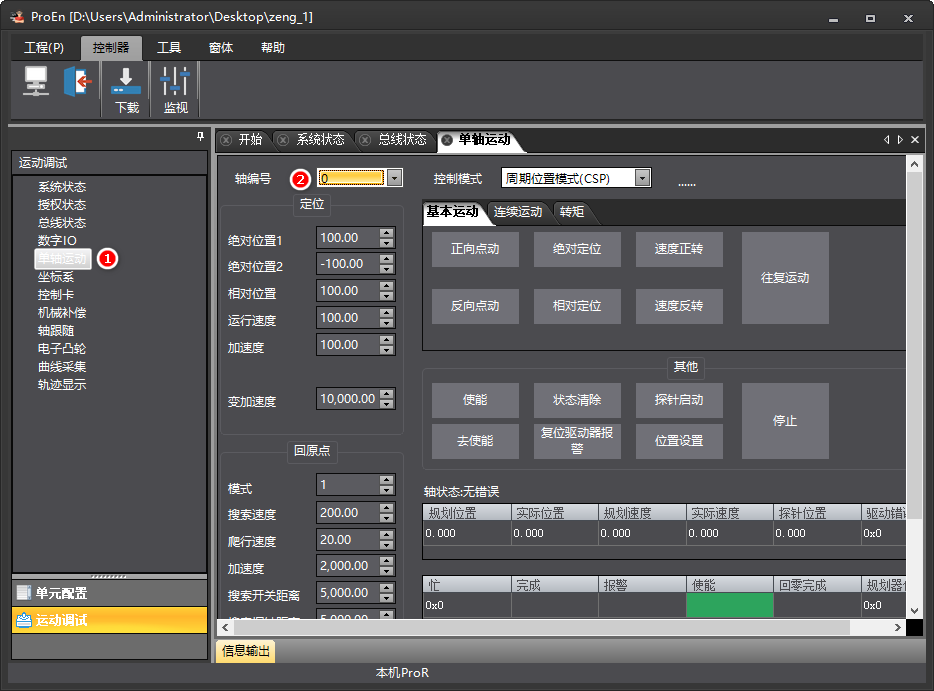
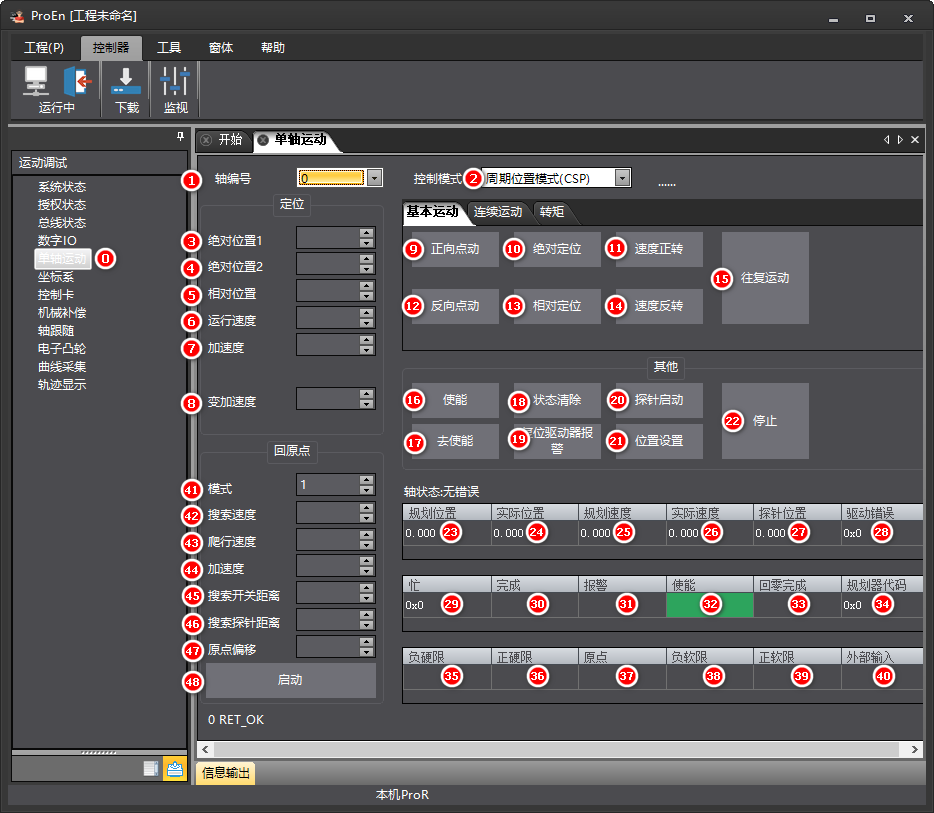
单轴功能调试
| 序号 | 注释 |
| 0 | 点击单轴调试,出现右侧界面 |
| 1 | 轴序号:自动识别添加的轴数,可切换需要调试的轴 |
| 2 | 控制模式:可切换与驱动器的控制模式详见 |
| 3 | 绝对位置1:绝对定位和往复运动时用到的位置 |
| 4 | 绝对位置2:往复运动时用到的位置 |
| 5 | 相对位置:相对定位用到的位置 |
| 6 | 运行速度:除回原点外用到的运行速度,回原点相关速度参考42、43 |
| 7 | 加速度:除回原点外用到的加速度,根据机械性能设置,回原点加速度参考44 |
| 8 | 变加速度:除回原点外用到的变加速度,建议设置加速度30倍,最大1000倍(效果等同T形加减速曲线),回原点使用T形加减速曲线,无需设置变加速 |
| 9 | 正向点动:点击轴正向运动,松开停止运动 |
| 10 | 绝对定位:定位到“绝对位置1”的位置 |
| 11 | 速度正转:往正的方向速度模式运行 |
| 12 | 反向点动:点击轴反向运动,松开停止运动 |
| 13 | 相对定位:已当前位置为基准,定位”相对位置“的距离 |
| 14 | 速度反转:往负的方向速度模式运行 |
| 15 | 往复运动:“绝对位置1”“绝对位置2”之间来回定位 |
| 16 | 使能:驱动器上使能 |
| 17 | 去使能:驱动器下使能 |
| 18 | 状态清除:清除轴的状态 |
| 19 | 复位驱动器报警:清除驱动器的报警,部分报警无法清除可能需要断电 |
| 20 | 探针启动:启动捕获探针 |
| 21 | 位置设置:可设置轴的当前位置,轴停止状态下可设置 |
| 22 | 停止:所有的单轴调试运动的停止信号 |
| 23 | 规划位置:软件定位时的规划位置 |
| 24 | 实际位置:驱动器上读取的实际位置 |
| 25 | 规划速度:软件定位时的规划速度 |
| 26 | 实际速度:根据驱动器位置计算出的实际速度 |
| 27 | 探针位置:探针捕获到的位置 |
| 28 | 驱动错误:驱动器错误信号 |
| 29 | 忙:0为不忙,其他bit位对应不通 |
| 30 | 完成:轴定位正常完成 |
| 31 | 报警:轴报警,状态报警 |
| 32 | 使能:驱动器ready状态 |
| 33 | 回原完成:回原正常完成标志,启动回原后清除 |
| 34 | 规划器代码:规划器代码 |
| 35 | 负限位:硬件负限位 |
| 36 | 正限位:硬件正限位 |
| 37 | 原点:硬件原点 |
| 38 | 负软限位:软件负限位 |
| 39 | 正软限位:软件正限位 |
| 40 | 外部输入:连续运动设置的IO显示。 连续运动详见 |
| 41 | 回原模式:模式设置1-37 |
| 42 | 搜索速度:快速找到限位原点初始速度 |
| 43 | 爬行速度:查找探针或上下沿慢速 |
| 44 | 加速度:回原加速度,根据机械性能设置 |
| 45 | 搜索开关距离:查找限位原点最大距离 |
| 46 | 搜索探针距离:查找探针最大距离 |
| 47 | 原点偏移:回原后定位的距离,定位完成后位置会清零 |
| 48 | 启动:启动回原 |

| 序号 | 注释 |
| 1 | 速度-绝对位置:先执行速度模式运动,运动过程中接收到外部输入IO信号后自动切换到绝对定位模式定位到“绝对位置1”。 |
| 2 | 速度-相对位置:先执行速度模式运动,运动过程中接收到外部输入IO信号后自动切换到相对定位模式定位到“相对位置”。 |
| 3 | 绝对位置-速度:先执行绝对定位往“绝对位置1”运动,在定位过程中接收到外部输入IO信号后切换到速度模式运动。如果绝对定位完成后还未接收到外部输入IO信号则给完成信号 |
| 4 | 相对位置-速度:先执行绝对定位往“相对位置”运动,在定位过程中接收到外部输入IO信号后切换到速度模式运动。如果相对定位完成还未接收到外部输入IO信号则给完成信号。 |
| 5 | 速度方向:速度模式的方向。 |
| 6 | 缓冲模式:模式切换时的缓冲模式。 |
| 7 | 外部输入:外部输入IO按字节,位设置。 |
| 8 | 取反:未接实物可手动取反测试。 |
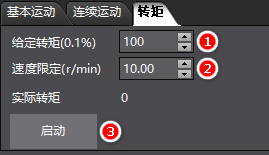
| 序号 | 注释 |
| 1 | 给定转矩:目标转矩 |
| 2 | 速度限定:限制最大速度 |
| 3 | 启动:启动扭矩模式 |
坐标系调试功能(需开启高级运动)。详见:功能案例
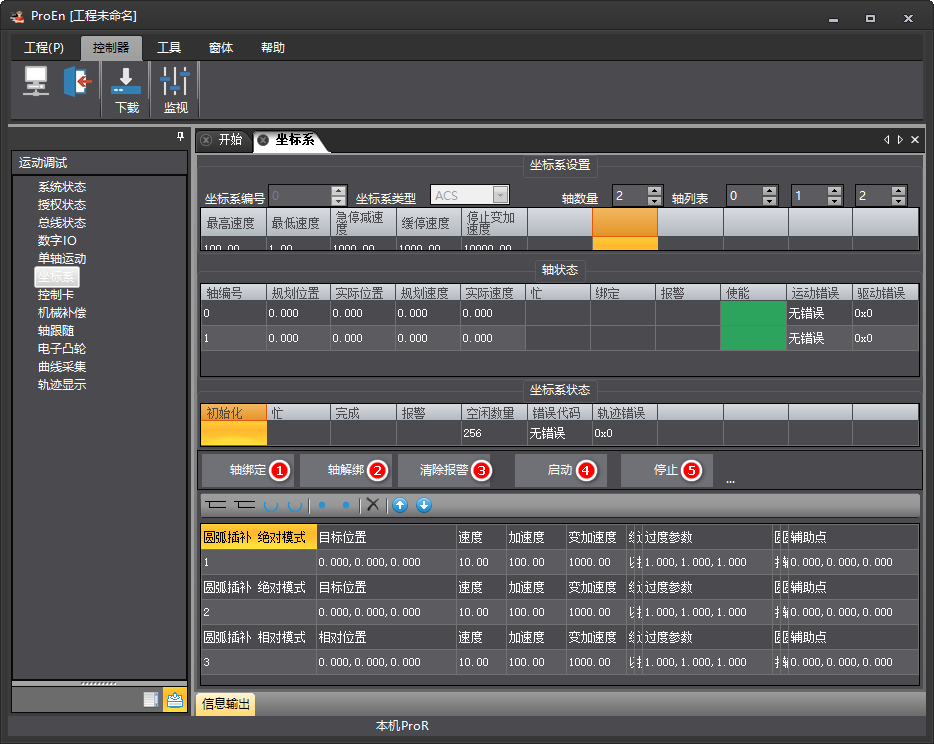
| 序号 | 注释 |
| 1 | 轴绑定:关联坐标系设置参数里的轴序号 |
| 2 | 轴解绑:解除坐标系轴序号绑定 |
| 3 | 清除报警:清除坐标系的报警 |
| 4 | 启动:按配置列表的轨迹参数跑轨迹 |
| 5 | 停止:停止坐标系运动 |
可查看脉冲卡的基本信息和脉冲卡的功能实现
可监控脉冲轴的配置信息和状态
启动对应编码器可监控编码器当前值。详见:功能案例

比较器功能。详见:功能案例

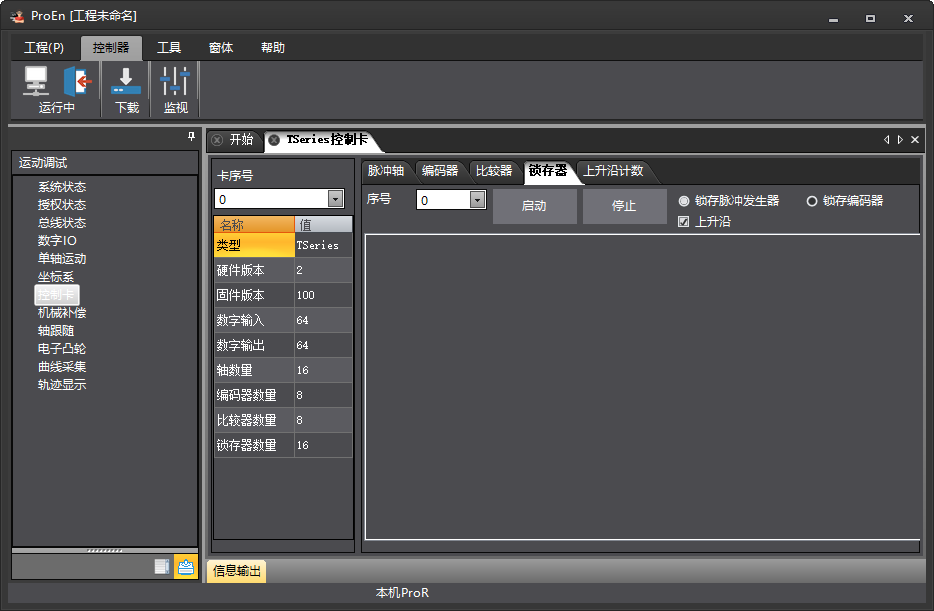
锁存器捕获功能。详见:功能案例
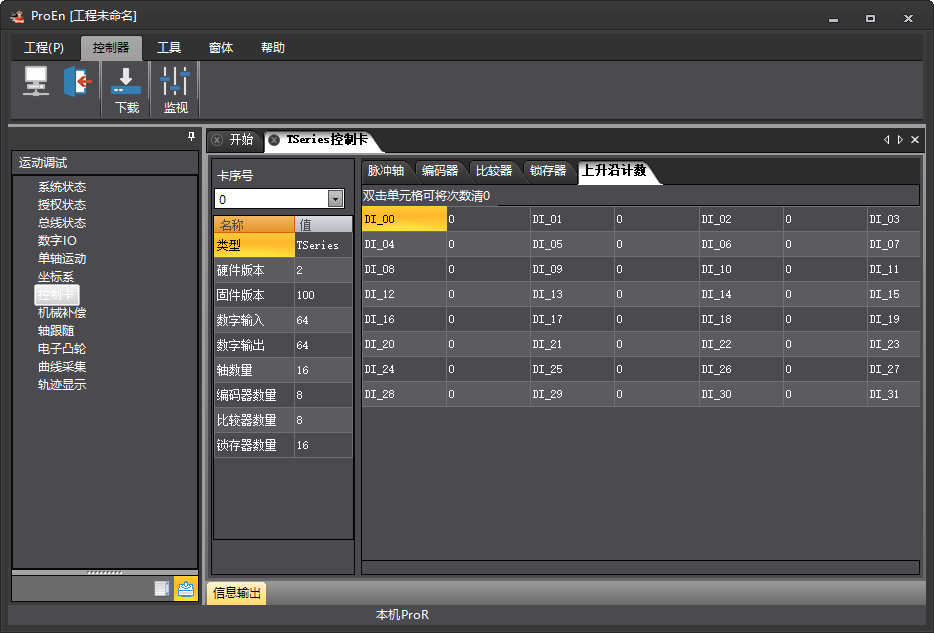
DI通道上升沿计数监控
螺距补偿和二维螺距补偿功能调试。详见:功能案例

如图:点位5补偿位置10mm,补偿量是6mm,那么10mm~20mm之间自动补偿6mm。
| 序号 | 注释 |
| 1 | 调整速度:启动补偿时调整位置的速度。 |
| 2 | 调整加速度:启动补偿时调整位置的加速度,一般是速度的10倍。 |
| 3 | 数据更新:禁用状态下才能更新数据。 |
| 4 | 补偿偏移量:填写两点之间的补偿量。 |
理论上的坐标系X方向与Y方向夹角应该是90度,但是工艺上很难做到正好成90度,X方向与Y方向可能会存在正负零点几度的误差,导致实际点位置与目标点位置不重合,所以此时需要用到二维补偿去弥补这一精度损失。
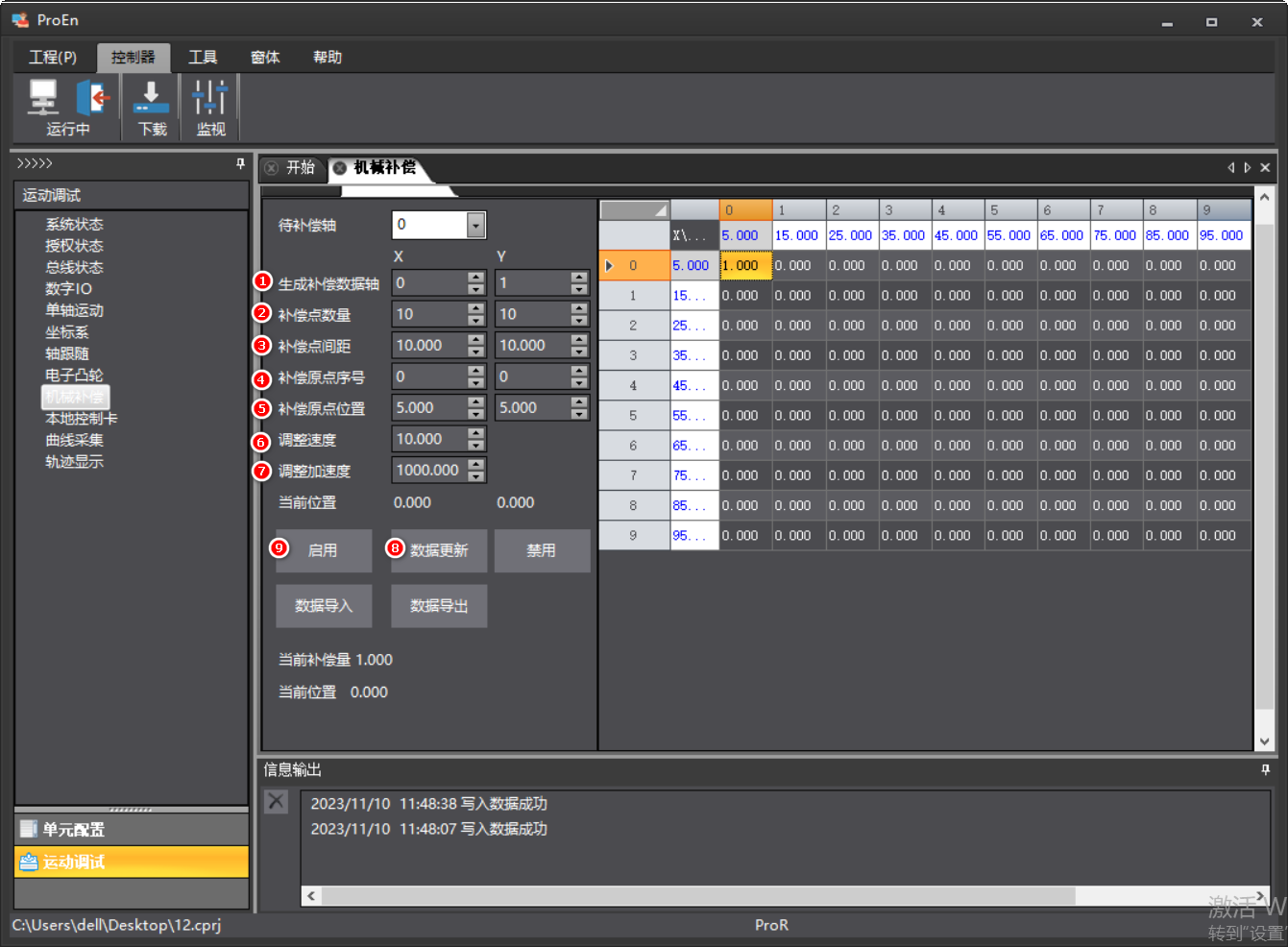
| 序号 | 注释 |
| 1 | 生成补偿数据轴:选择补偿轴的轴号。 |
| 2 | 补偿点数量:即选择标定板内标定点的数量,如图为10x10。 |
| 3 | 补偿点间距:设置XY标定点之间的间距。 |
| 4 | 补偿原点序号:设置以哪个标定点为原点,如图为(0,0)。 |
| 5 | 补偿原点位置:设置当前原点位置,根据补偿点间距,确定其他补偿点位置,如图原点位置为(5,5)。 |
| 6 | 调整速度:启动补偿时调整位置的速度。 |
| 7 | 调整加速度:启动补偿时调整位置的加速度,一般是速度的10倍。 |
| 8 | 数据更新:更新新修改的数据至右侧表格。 |
| 9 | 启用:启用最新更新的二维补偿数据。 |
轴跟随功能调试。详见:功能案例
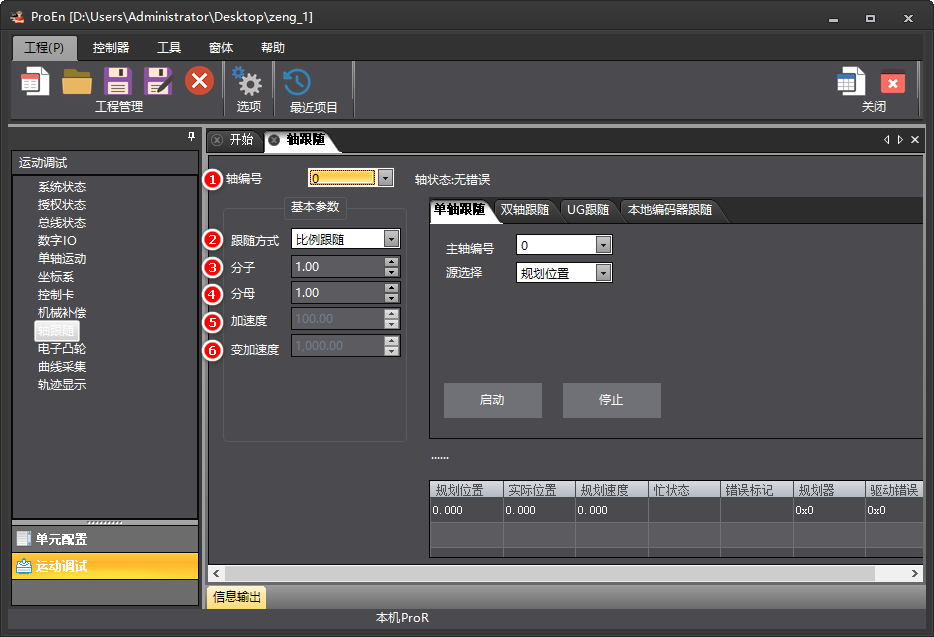
| 序号 | 注释 |
| 1 | 轴序号:关联的从轴序号。 |
| 2 | 跟随方式:支持比例跟随和加减速跟随。 |
| 3 | 分子:从轴分子 |
| 4 | 分母:从轴分母 |
| 5 | 加速度:从轴加速度 |
| 6 | 变加速度: |
①主轴序号:关联的主轴序号。
②源选择:支持规划位置和实际位置。

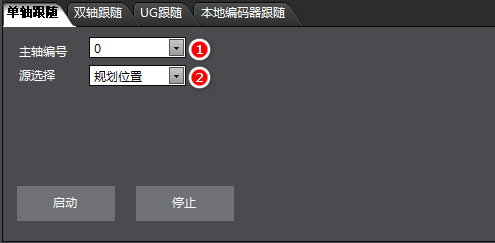
| 序号 | 注释 |
| 1 | 主轴序号:关联的两个主轴序号。 |
| 2 | 源选择:支持规划位置和实际位置。 |
| 3 | 分子:主轴分子 |
| 4 | 分母:主轴分母 |
| 5 | 圆心:设置圆心位置(合成圆,弧度单位模式用) |
| 6 | 组合模式:支持加法、减法、合成距离、合成圆,弧度单位。 |
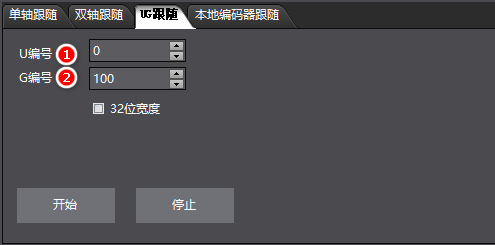
| 序号 | 注释 |
| 1 | U编号:U编号 |
| 2 | G编号:G编号 |
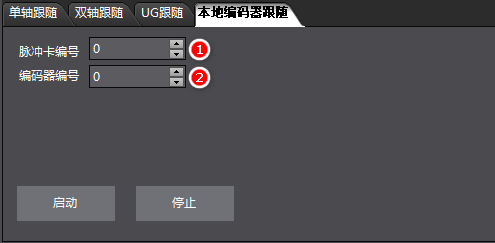
| 序号 | 注释 |
| 1 | 脉冲卡编号:固定为0 |
| 2 | 编码器编号:0~7 |
详见:功能案例
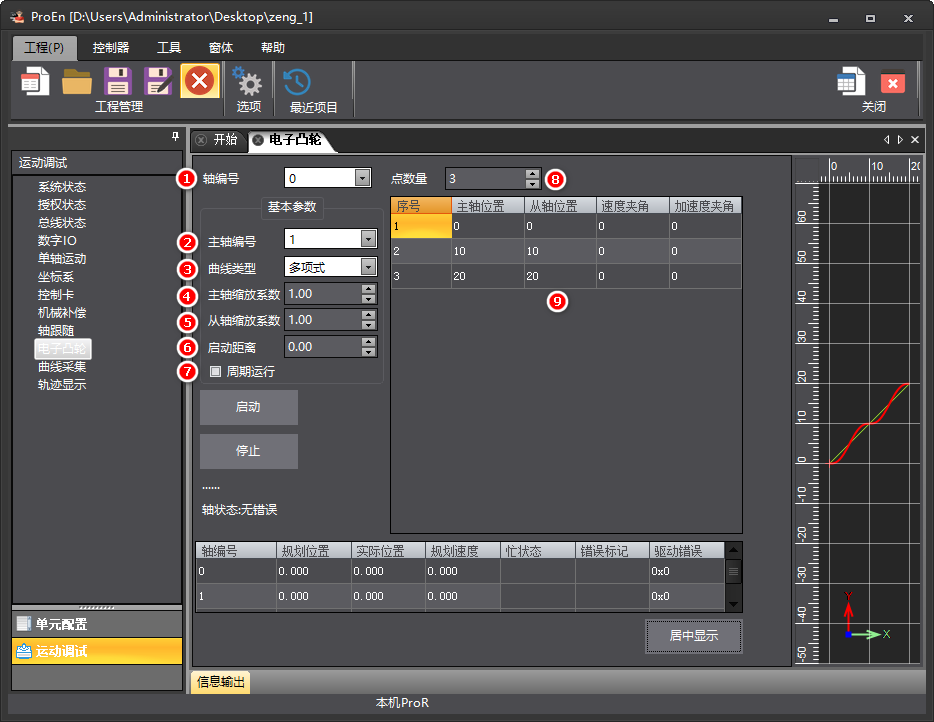
| 序号 | 注释 |
| 1 | 轴序号:关联的从轴序号 |
| 2 | 主轴序号:关联的主轴序号 |
| 3 | 曲线类型:支持多项式和样条。 多项式:支持自定义速度夹角、加速度夹角参数。 样条:根据内部算法自动计算出速度夹角、加速度夹角,不支持自定义夹角参数。 |
| 4 | 主轴缩放系数:主轴缩放倍率 |
| 5 | 从轴缩放系数:从轴缩放倍率 |
| 6 | 启动距离:启动后主轴先移动此距离后,从轴在跟随移动 |
| 7 | 周期运行:跟随主轴做周期运动 |
| 8 | 点数量:添加或减少点数量 |
| 9 | 位置数据:设置主轴位置及主轴位置对应的从轴位置,自定义速度夹角和加速度夹角 |
示波器运行在总线环
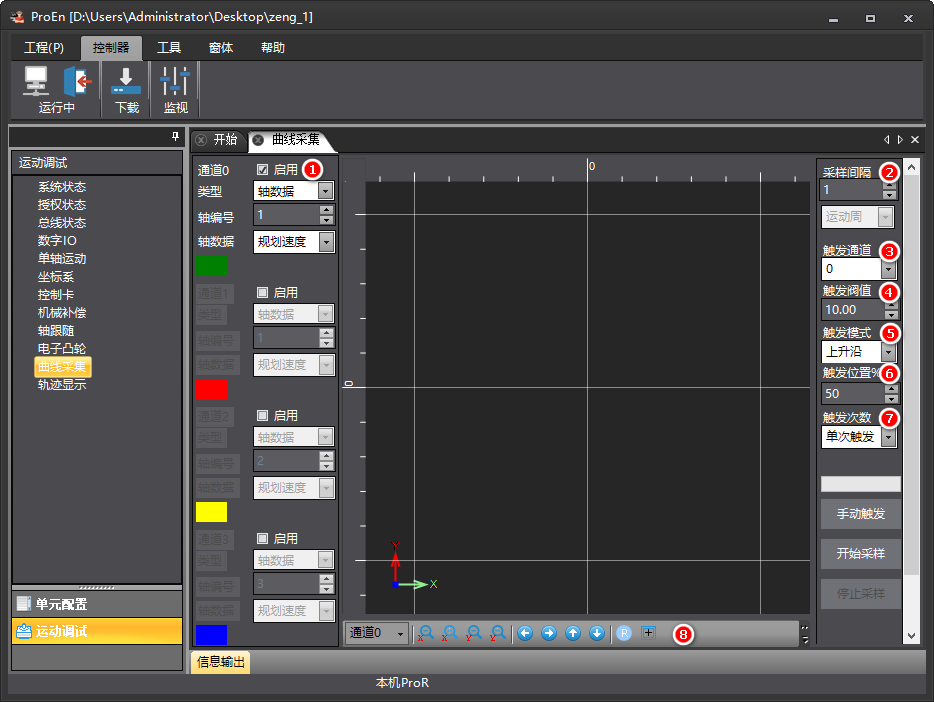
| 序号 | 注释 |
| 1 | 曲线采集数据源配置:共四通道,支持轴数据、对象字典、UG寄存器 |
| 2 | 采样间隔:运动周期单位,默认为1ms(采集1000个单位为1S) |
| 3 | 触发通道:曲线触发通道选择 |
| 4 | 触发阈值:设置触发的阀值 |
| 5 | 触发模式:支持自由运行(连续采集)、手动触发、上升沿、下降沿、高电平、低电平 |
| 6 | 触发位置%:触发位置按百分比设置 |
| 7 | 触发次数:支持单次触发和重复触发 |
| 8 | 工具栏:曲线的放大,缩小、移动、复位、居中功能 |

| 序号 | 注释 |
| 1 | 双击“轨迹显示”打开页面 |
| 2 | 轨迹采集数据源配置:支持轴数据、对象字典、UG寄存器。 |
| 3 | 缓冲数量:如图,记录10*100个运动周期采集的数据。 |
| 4 | 显示模式:固定XY模式。 |
| 5 | 开始追踪:实时采集配置轴的数据生成轨迹显示在图中 |
| 6 | 居中按钮:居中显示曲线。 |
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |