- 对于总线驱动器,系统默认CSP模式,由上位机规划曲线。
- 运动单位说明:例:100unit = 脉冲当量 * 100。
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
本节主要介绍内容如下:
位置控制分为两种:
相对运动:以当前位置为参考位置进行位置移动。
绝对运动:以绝对原点为参考位置进行位置移动。
| 注意 | |
| |
|
相关函数 |
||||
 |
||||
|
| 注意 | |
| |
|
运动说明 |
|
 |
|
如下图所示,当前轴在300pulse的位置,相对运动100 pulse后轴停在400 pulse的位置;绝对运动100 pulse后轴停在100 pulse的位置,相当于控制部件向负方向移动了200个pulse的距离。 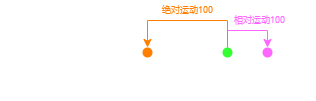
两种模式各有优点,如:通过一系列坐标点定义一条轨迹时,在绝对坐标模式下修改其中某点坐标不影响后续点的坐标;在相对坐标模式下用循环命令可以重复执行这条轨迹。
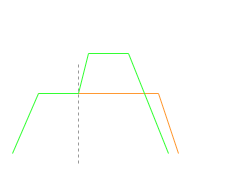 
注意:以下特性都只跟绝对位置运动有关 |
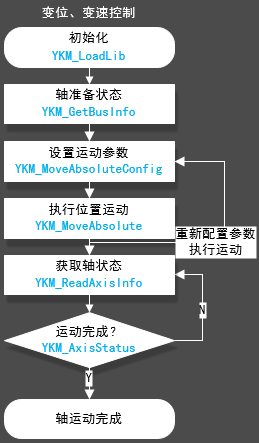
流程图 |
|
 |
|
|
程序编写 |
|
 |
|
RetCode result; |
常见问题及说明 |
|
 |
|
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |