相关函数

| YKM_StartHome | 回原运动 |
| ProCon说明 快速入门 运动控制 EtherCAT 实时程序 API函数 控件库 硬件说明 问题排查 示例代码 |
本节主要介绍内容如下:
相关函数 |
||
| |
||
|
| 注意 | |
 |
|
运动说明 |
|
 |
|
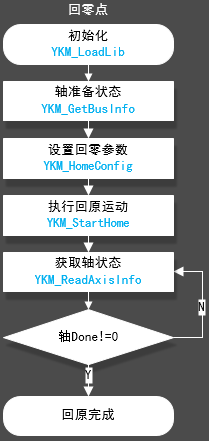
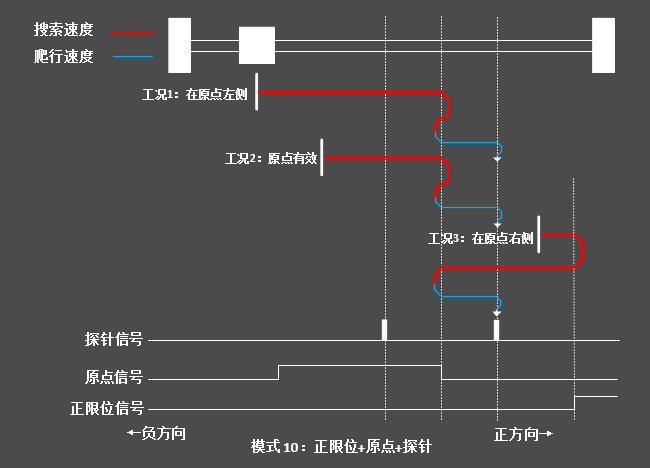
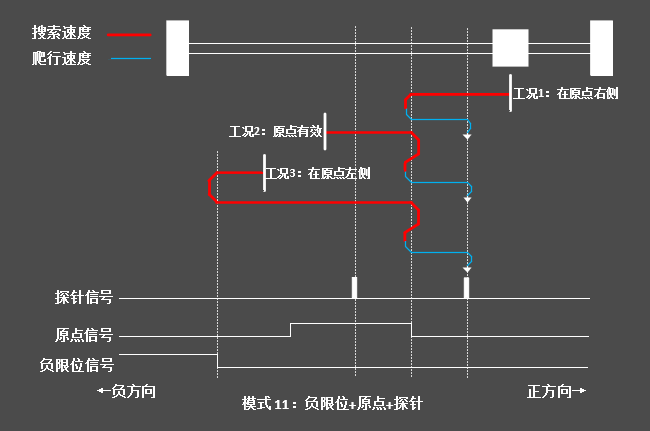
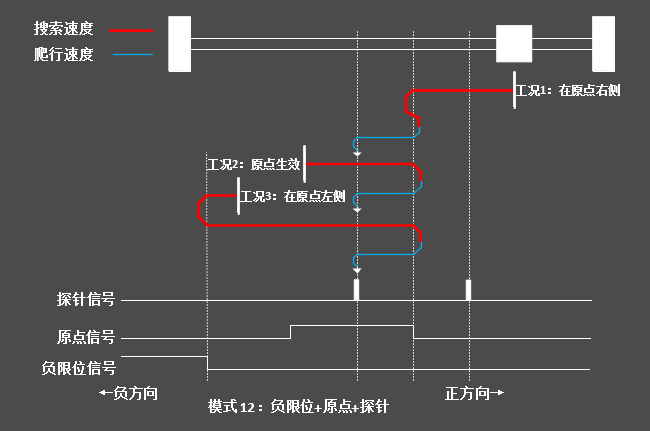
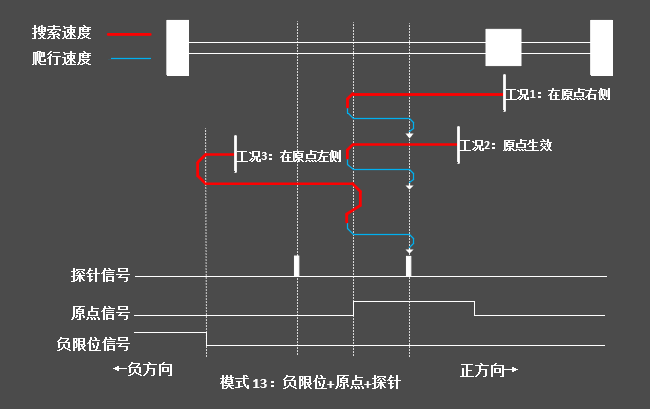
寻找原点的运动为回原运动。控制器在进行精确定位运动之前,需执行回原运动,设定原点。 |
流程图 |
|
 |
|
|
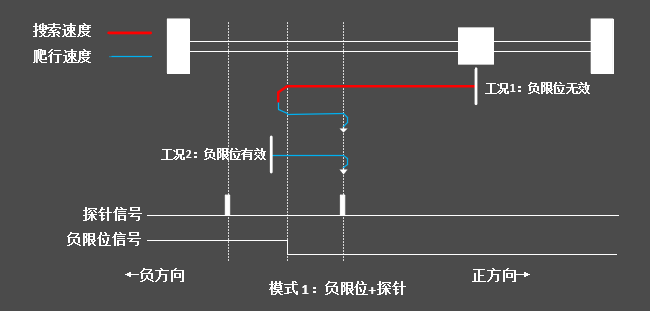
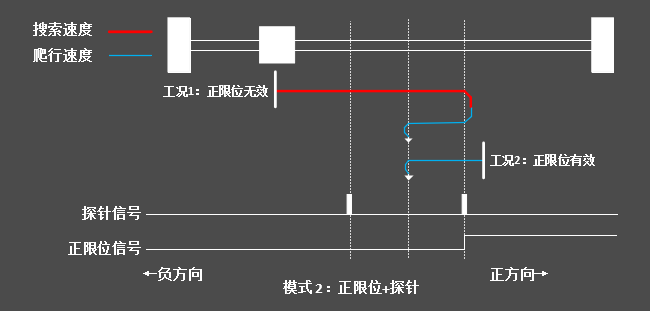
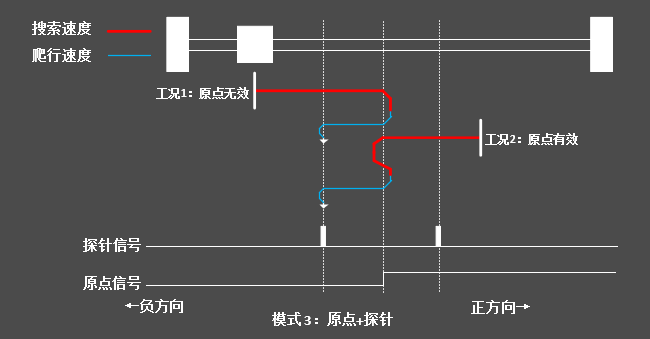
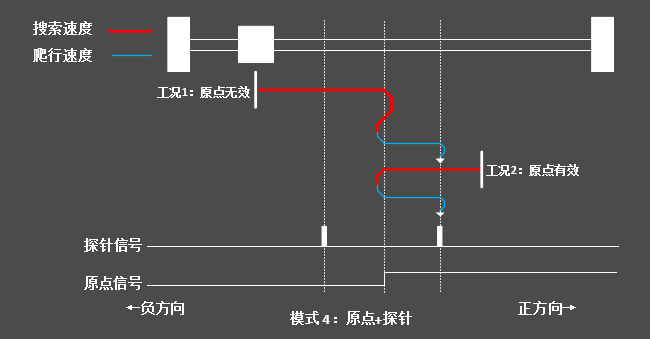
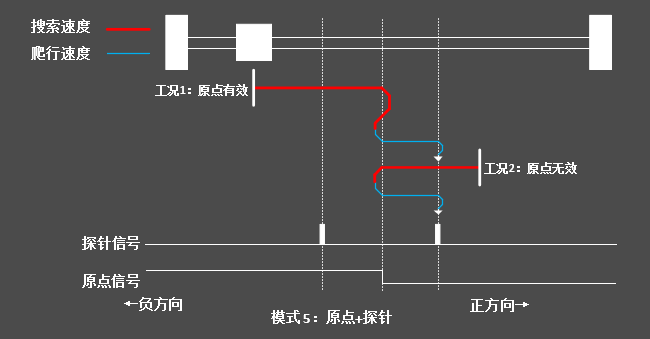
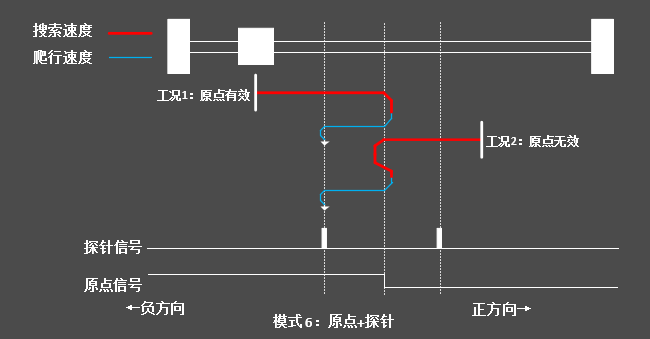
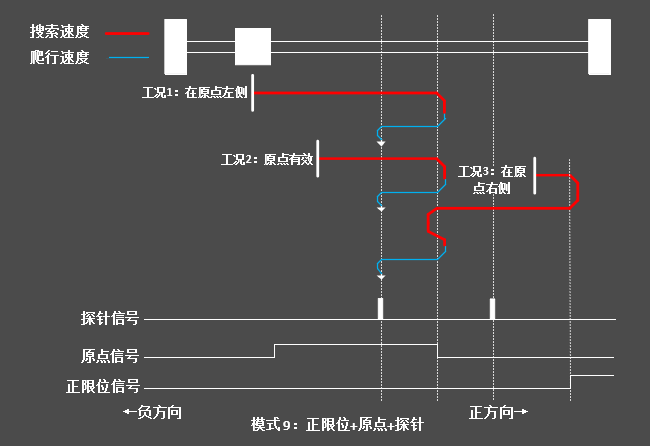
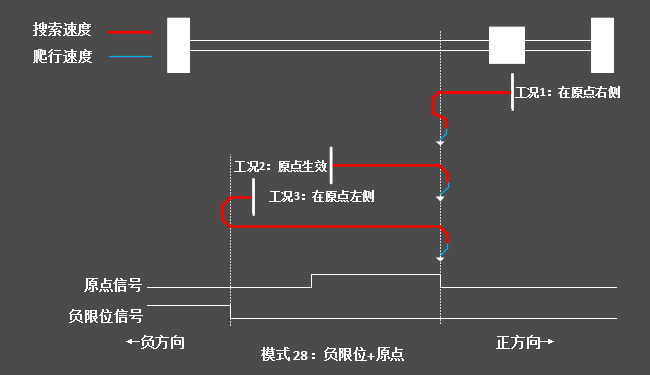
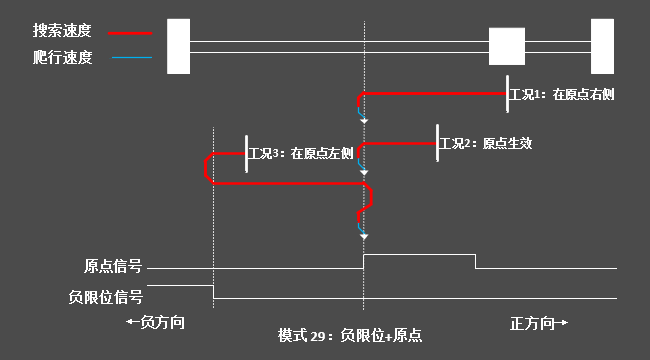
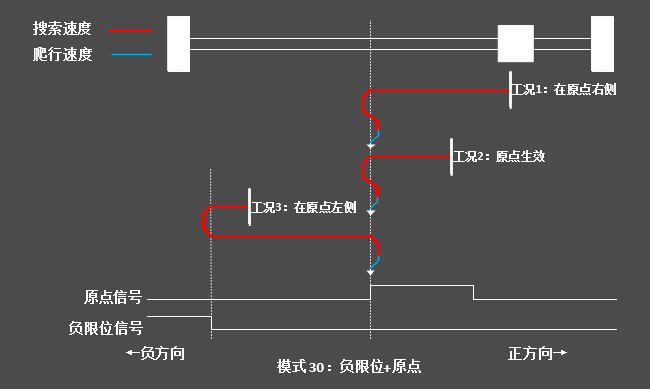
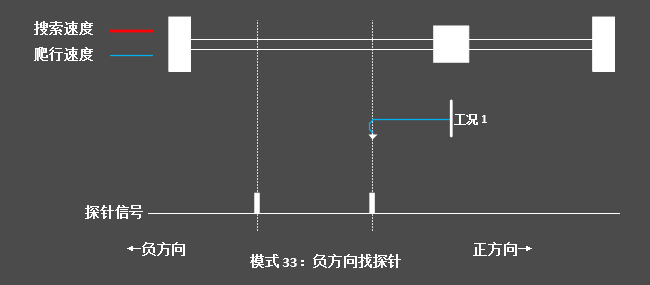
回原模式 |
|
| |
|
模式1
模式2
模式3
模式4
模式5
模式6
模式7
模式8
模式9
模式10
模式11
模式12
模式13
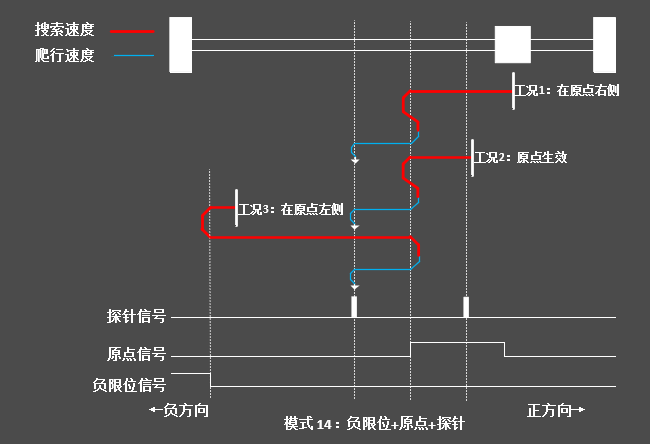
模式14
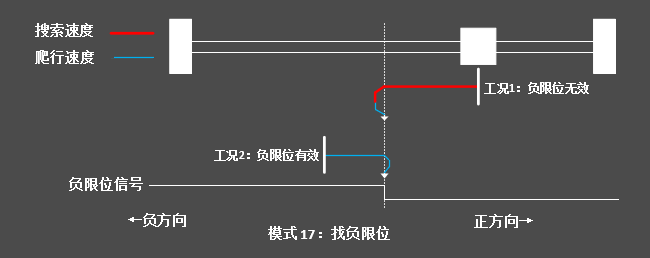
模式17
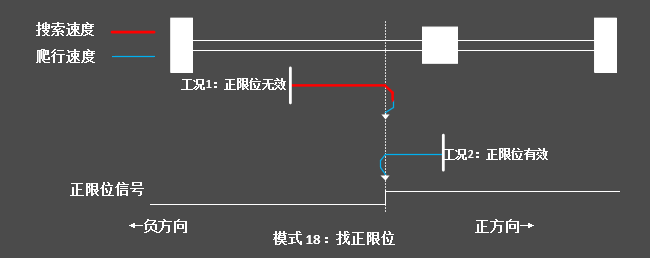
模式18
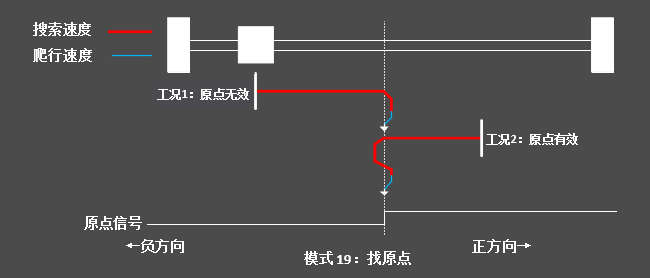
模式19
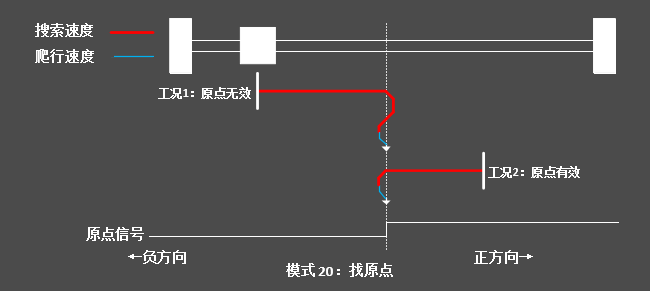
模式20
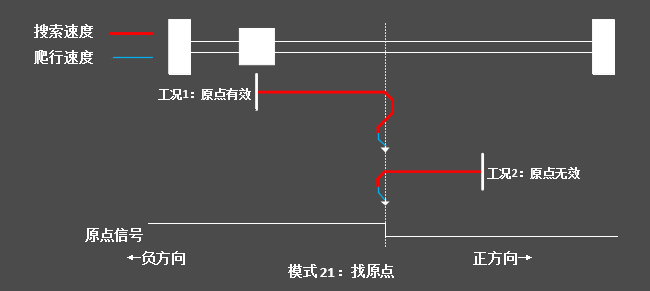
模式21
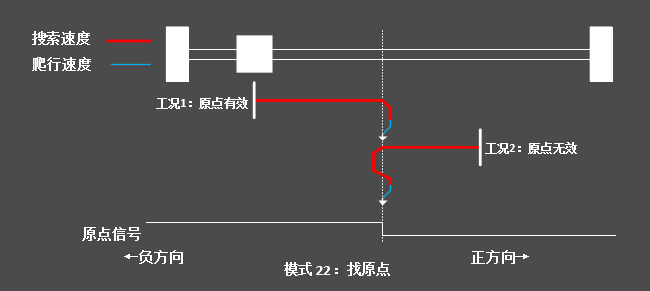
模式22
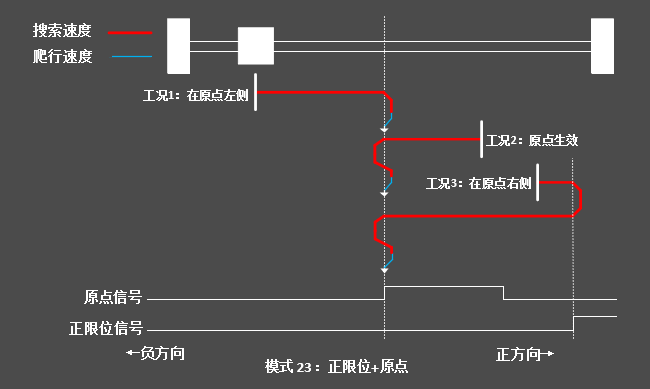
模式23
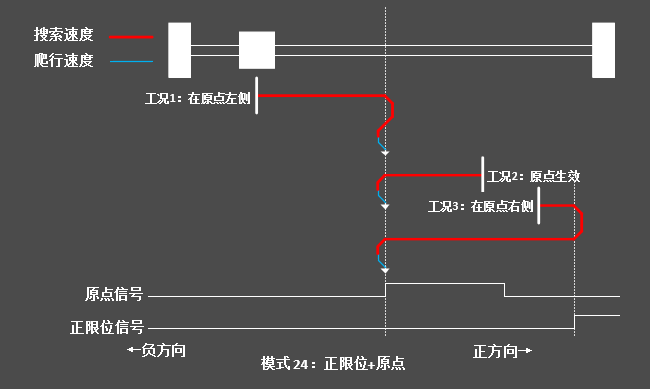
模式24
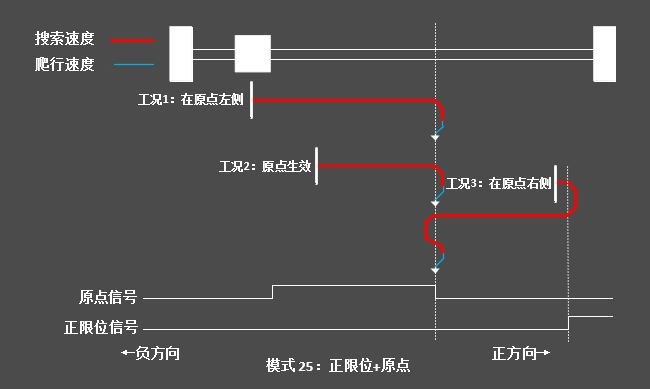
模式25
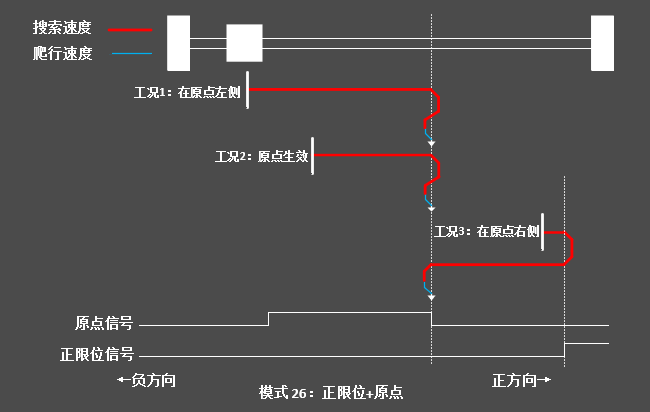
模式26
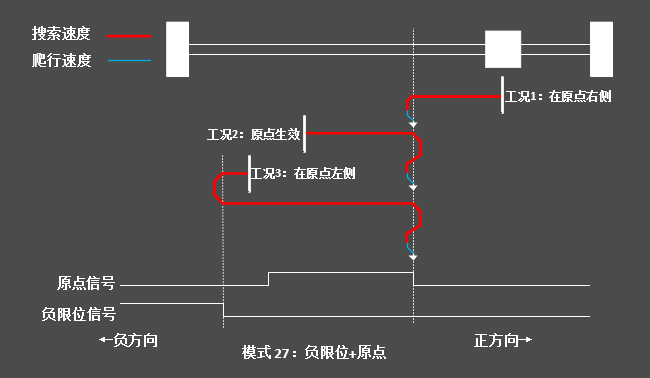
模式27
模式28
模式29
模式30
模式33
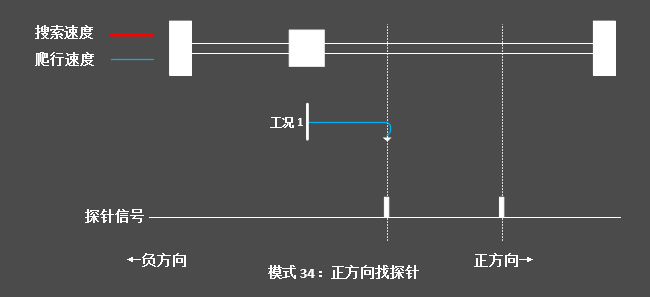
模式34
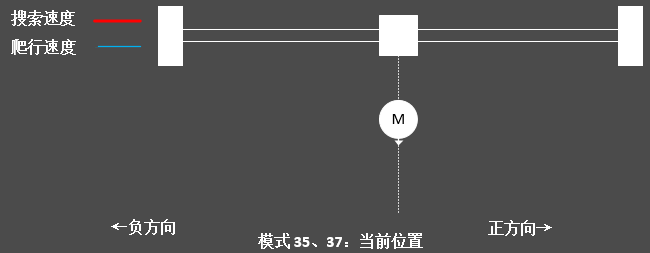
模式35、37
|
程序编写 |
|
 |
|
RetCode result; |
常见问题及说明 |
|
 |
|
| Copyright © 2015 深圳市优易控软件有限公司 www.proutech.com |